2 spinup-PG
1. 策略梯度导出
首先考虑参数化的随机策略, 我们的目标是基于该策略最大化期望奖励  , 使用梯度上升算法优化策略.
, 使用梯度上升算法优化策略.
(1)
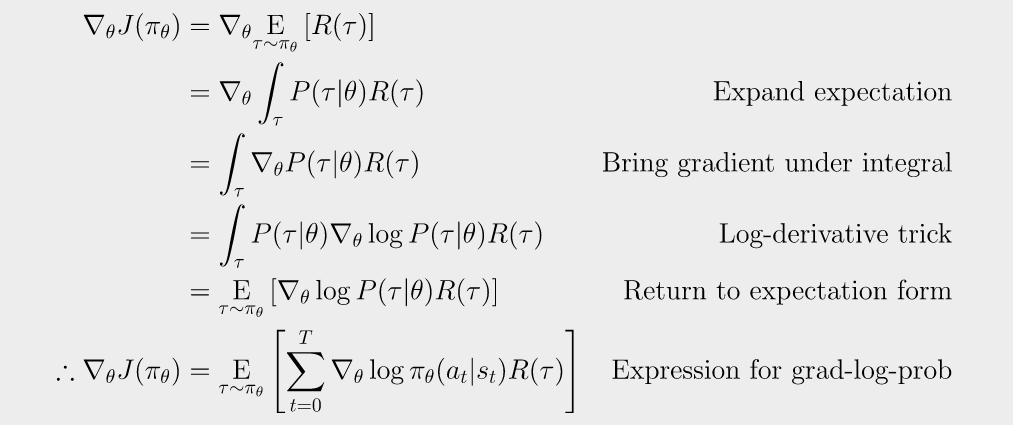
策略性能函数的梯度  称为策略梯度. 一般PG算法需要两个步骤: 1) 导出策略performance的梯度, 表示成期望值的形式; 2) 构造期望值的抽样估计函数.
称为策略梯度. 一般PG算法需要两个步骤: 1) 导出策略performance的梯度, 表示成期望值的形式; 2) 构造期望值的抽样估计函数.
首先介绍几个概念:
- Probability of a Trajectory.
(2)

- The Log-Derivative Trick.
(3)

- Log-Probability of a Trajectory.
(4)

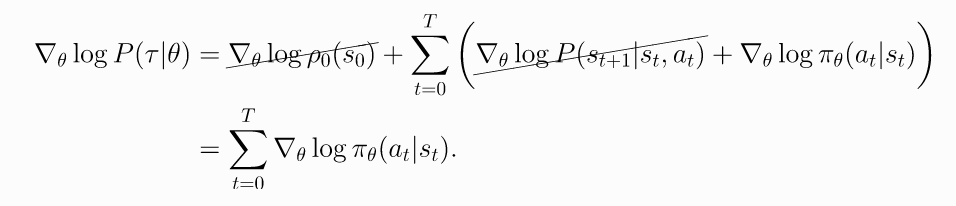
Gradients of Environment Functions. 环境动力学方程不依赖于参数, 所以,的梯度为0.
Grad-Log-Prob of a Trajectory.
(5)
由此,
导出策略梯度
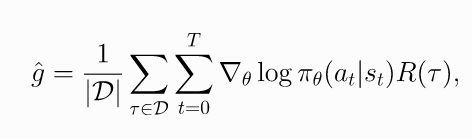
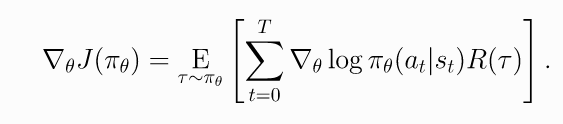
因此策略梯度可以表示成期望的形式, 可以使用样本均值来估计. 通过策略从环境中获取轨迹, 则策略梯度估计值为
(6)
2. 代码
代码: github
You Should Know
- 数据分布与参数有关. 一般SL中的loss 函数中数据与参数是独立的, 但是这里的数据是根据策略参数从环境中采样的.
- It doesn't measure performance 一般损失函数用来评估性能函数. 但是这里我们关心的是期望回报值J. 但是这里的loss函数并不近似该值. 这里使用loss 的唯一用处是为了表明, 在当前参数下进行评估时, 使用当前参数生成的数据, 它是性能函数的负梯度. 但是当执行一步梯度下降之后就与当前性能函数无关了. 这意味这用一个batch最小化loss, 不能保证提升环境期望奖励. loss可以到负无穷, 策略性能函数也会崩坏. 在监督学习里经常称之为过拟合. 但是在RL意义不一样, 因为这里不牵扯泛化
==这里说明上述loss的问题是为了警示: 在监督学习里关注loss下降, 模型表现变好, 但是在策略梯度里, 关注loss下降是没有意义的, 只需要关注平均回报.==
3. Expected Grad-Log-Prob Lemma
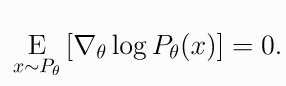
这一节导出一个常用的中间结果. 称为期望log梯度概率引理(Expected Grad-Log-Prob, EGLP lemma).
EGLP Lemma假设是随机变量上的一个参数化概率分布, 那么
(7)
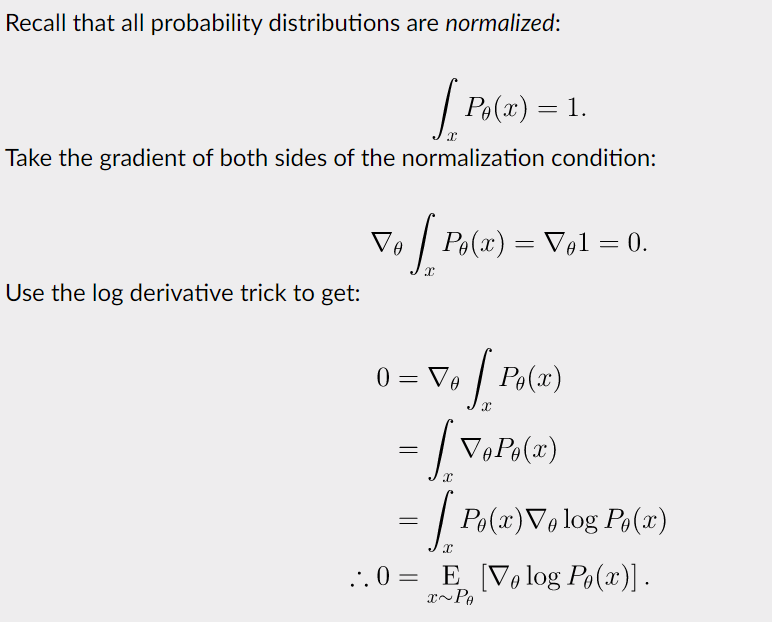
证明
Proof
4. 去除之前状态的影响--降低方差
上一步的策略梯度为
(8)
这个公式考虑了所有步骤的奖励, 包括当前状态之前的奖励. 按理说不应该考虑, 所以上式可以变化为
(9)

上式称为"reward-to-go policy gradient".
为什么去掉之前时间步的奖励会变好呢? 策略梯度的一个关键问题是使用多少trajectory样本得到其低方差估计. 上述公式(8)的均值为0 但是包含非零方差, 因此这些样本在策略梯度的估计中添加了噪声. 通过去掉这些没用的reward, 减少了噪声, 可以减少所需的样本数量.
这本质也是解决了不同动作的信用分配问题.
5. Baselines in Policy Gradients--降低方差
EGLP lemma说明任何只依赖状态的函数的期望log梯度为0
(-1)

因此在公式里减去一个baselines不影响最后的梯度. 所以有了加入baseline的trick.
(10)

为什么加入baseline? 如果r总是正的, 可以通过log概率调整动作分布. 但是因为是sampling, 有些动作没有抽样到, 其概率分布会变小. 一般 
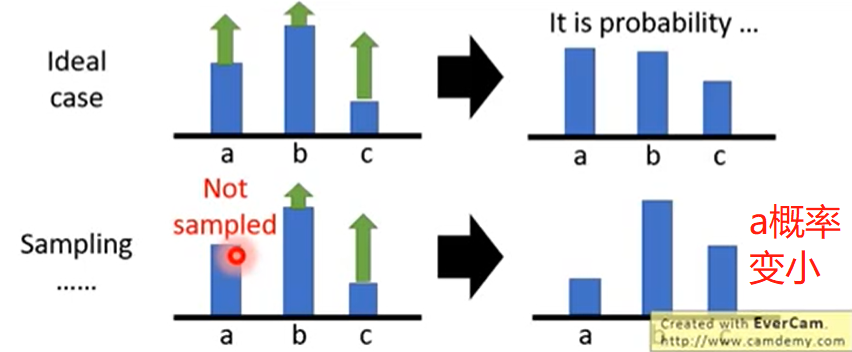
动作a因为没被抽样到, 概率会变小, 但a可能是个好动作
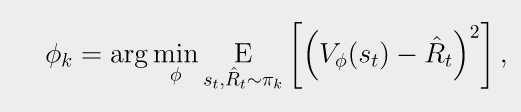
常用的baseline是 on-policy value function . 该值是从状态s出发根据策略行动的平均回报.
一般选择可以在sample估计中减策略梯度的方差, 加速训练. 一般使用的值函数用神经网络近似, 使用MSE训练,
(-1)
6. 策略梯度其他形式
目前策略梯度的通用形式为
(11)
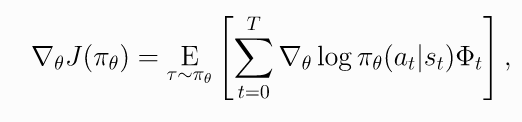
其中可以有多种形式
(11.1)
(11.2)
(11.3)
(11.4)
- The Advantage Function. 优势函数定义为

(11.5)
 ,
,
重要论文: 广义优势估计( Generalized Advantage Estimation, GAE)