3. 游戏AI-AlphaGoMaster
paper: Mastering the game of Go with deep neural networks and tree search
核心观点:
- 完全信息博弈存在最优值函数. 该最优值函数可以通过假设双方为完美对手, 然后通过树搜索方法计算. 其复杂度为指数级.
- 存在降低树搜索复杂度的方法: 1)通过状态估计减少搜索深度; 2)通过行动策略抽样减少搜索的宽度. alphaGo也是从这两方面想办法, 使用了MCTS算法.
- MCTS算法思想: 通过MC展开计算状态值. 经过模拟对战, 树越来越大,估计值也越来越准, 在搜索时选择动作的策略也可以通过选择价值高的动作得到提升.最终策略和值函数都会收敛到最优.
- MCTS方法本质是两次近似.
 .先用MC模拟近似模拟策略的值, 然后用模拟策略近似minimax optimal actions.
.先用MC模拟近似模拟策略的值, 然后用模拟策略近似minimax optimal actions. - alphaGo使用value network和policy network减少MCTS树的宽度和深度.
- 策略网络本质是一个policy-gradient reinforcement learning方法.
1. 整体结构
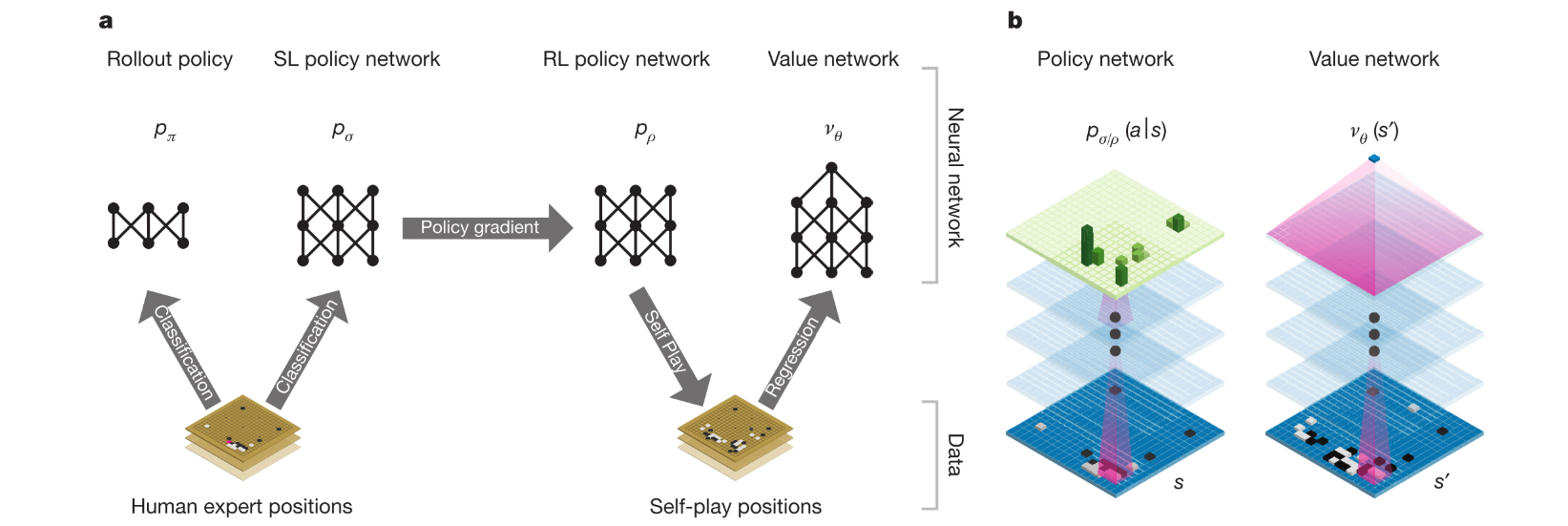
算法整体结构如图1. 包含四个部分: Rollout policy; SL policy network; RL policy network; Value network
 |
|---|
 |
具体过程为:
- 首先基于监督学习方法用人类走子数据训练一个SL policy network. 该部分用于提供即时反馈和梯度.
- 同时, 训练快速走子策略(Rollout policy), 在MC展开的时候可以快速抽样动作.
- 然后, 用自博弈训练RL policy network. 该部分为了让策略网络学会赢得游戏, 而非学习预测下一步动作(进一步提升SL策略).
- 最后, value network用于预测游戏的胜者.
2. 具体介绍
2.1 SL policy network
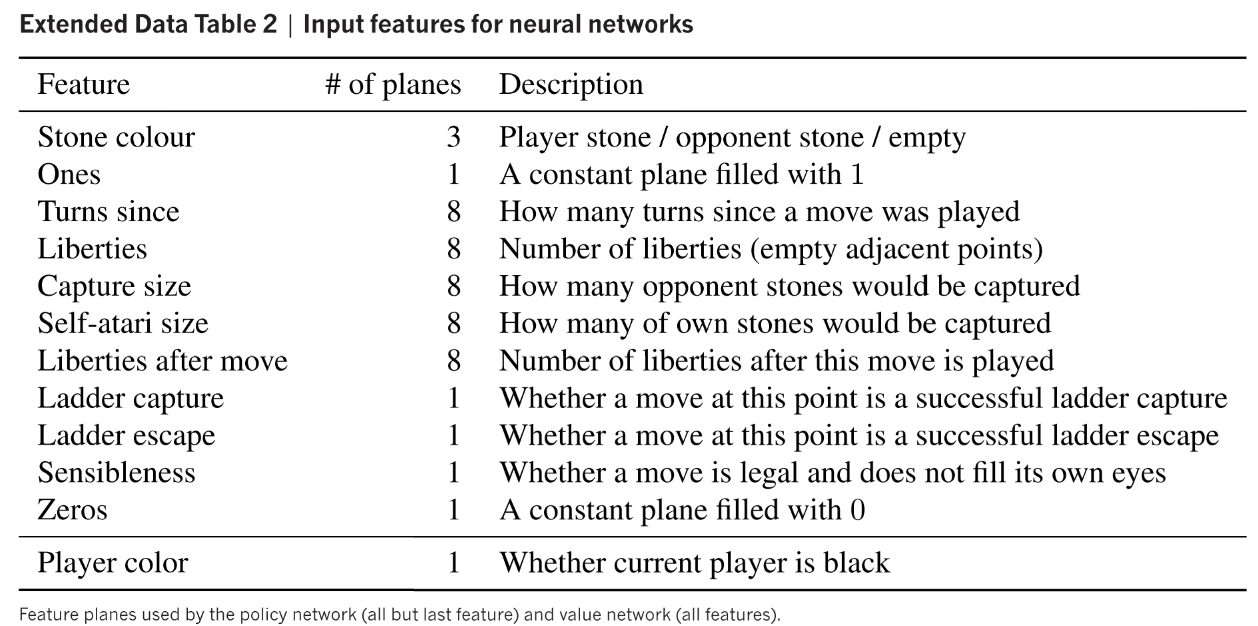
SL policy network使用随机梯度上升训练, 数据是3000万个状态动作对, 输入有抽象特征或者原始棋局, 网络为13*(Conv_Relu)+softmax.
预测准确率为(57.0% using all input features, and 55.7% using only raw board position and move history as inputs). 之前算法最好为44.4%. 预测准确率的提升对alphaGo胜率表现很重要. 决策时间3ms.
大型网络太慢, 所以用small pattern features的linear softmax训练了一个更快但准确率低的rollout policy.
准确率24.2%, 决策时间
2.2 RL policy network
RL 策略网络结构与SL相同, 并用SL网络参数初始化, 使用策略梯度算法优化. 对手策略从之前迭代随机抽取, 防止过拟合当前策略. 奖励函数在最终状态前全是0, 结果表示最终奖励. 网络使用随机梯度上升最大化期望结果输出.
该策略不用搜索过程对战Pachi, 胜率为85%. SL policy胜率只有11%.
2.3 RL value network
这里首先假设完美对手博弈, 存在最优值函数. 这里使用函数逼近,  . 用MSE损失训练.
. 用MSE损失训练.
直接用outcome作为标签训练数据容易过拟合. 相邻时间步之间的数据相关性很强, 这里用self-play生成不同的训练数据
2.4 Searching with policy and value networks
 |
|---|
 |
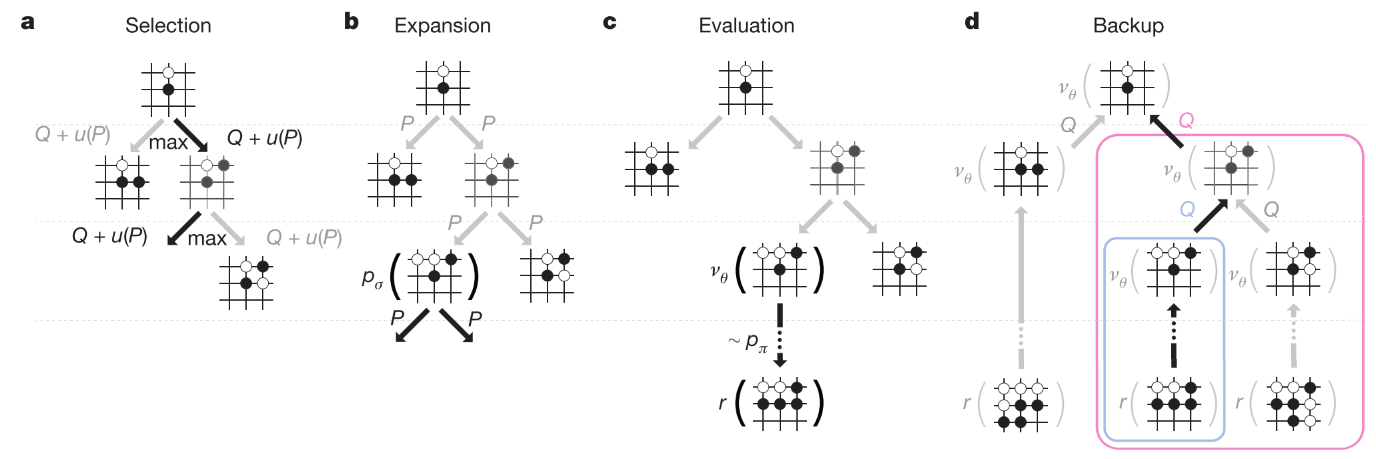
MCTS 过程如图3所示. 节点代表状态, 边代表动作. 边保存, 分别表示动作值, 访问次数, 先验概率.
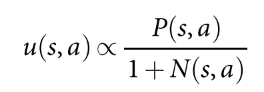
- 动作选择, 公式如下, 其中bonus随访问次数衰减, 鼓励探索.

- 扩展. 在叶子节点, 使用SL policy处理一次, 得到所有合法动作的概率分布作为先验概率.
- 评估. 使用两种方法评估: 值网络; 快速走子得到的结果. 这两个值组合成状态值.
(2)

- 回溯. 更新遍历过的动作值和访问次数. 其中i表示第i次模拟.
(3)
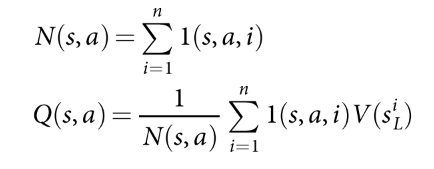
搜索过程结束则从根节点选择最常访问的子节点执行.
另外SL策略比RL策略表现好, 但是RL策略导出的RL值函数表现比SL值函数好.
硬件环境: 40线程, 48CPUs, 8GPUs.
alphaGo与樊辉比赛时, 决策过程如下图所示.
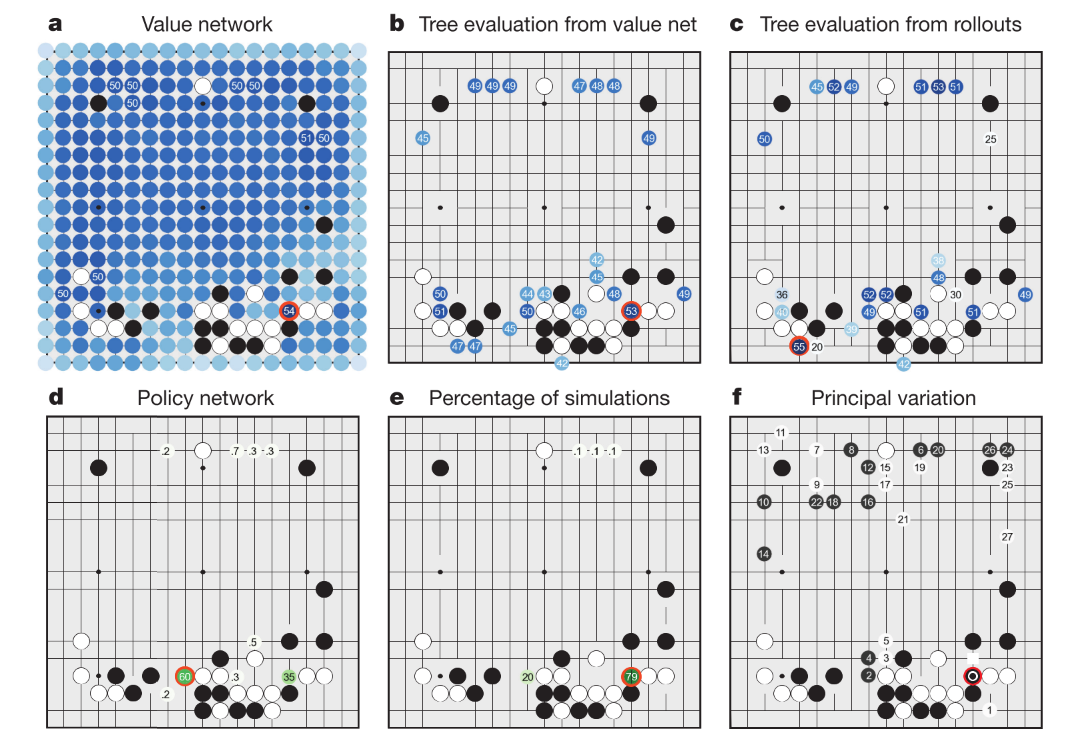 |
|---|
 |
3. 实现细节(这部分略看可以, 前边重点)
3.1 问题设置
- 定义为二人零和博弈问题. 确定性状态转移方程, 中间步骤0奖励. 零和博弈在双方为完美对手时存在唯一最优值函数.
- 之前工作: minimax搜索, alpha-beta 剪枝算法等,在围棋问题不好用. UCT算法鼓励探索.
3.2 搜索算法
搜索树节点包含状态和边; 边包括统计信息  .
.
 |
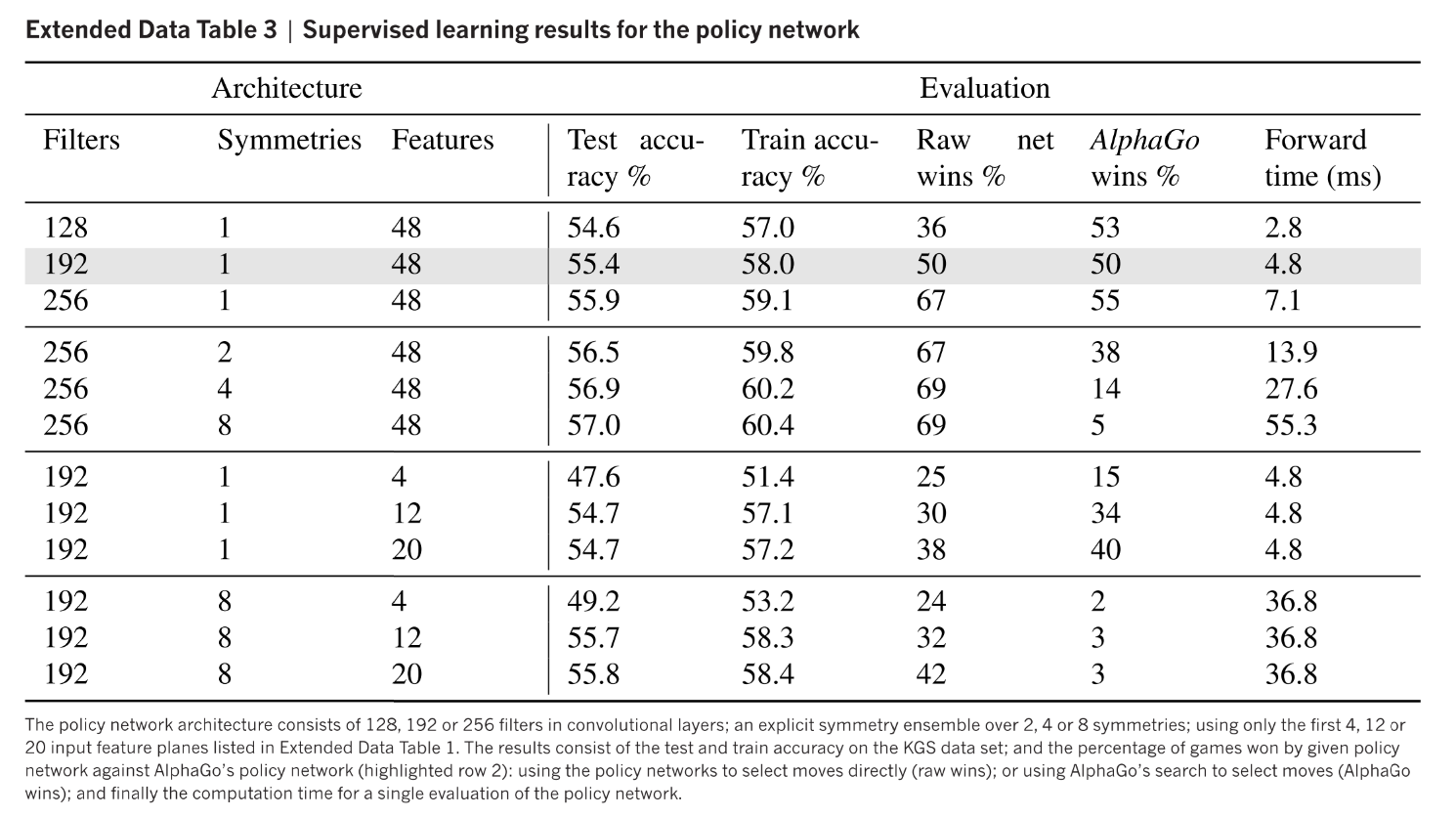 |
|---|---|
| 表1Input features for neural networks | 表2 Supervised learning results for the policy network |