2 spinup-VPG
策略梯度算法的关键思想是: 提高高回报操作的动作的概率, 减少低回报动作的概率.
VPG算法:
- on-plocy算法
- 可用于离散或连续动作空间
- 支持使用MPI接口并行化
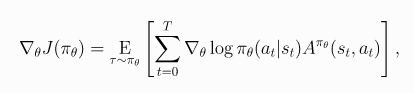
公式定义
令 代表策略, 则性能函数的梯度是
(1)
则随机梯度上升算法更新公式为
(2)
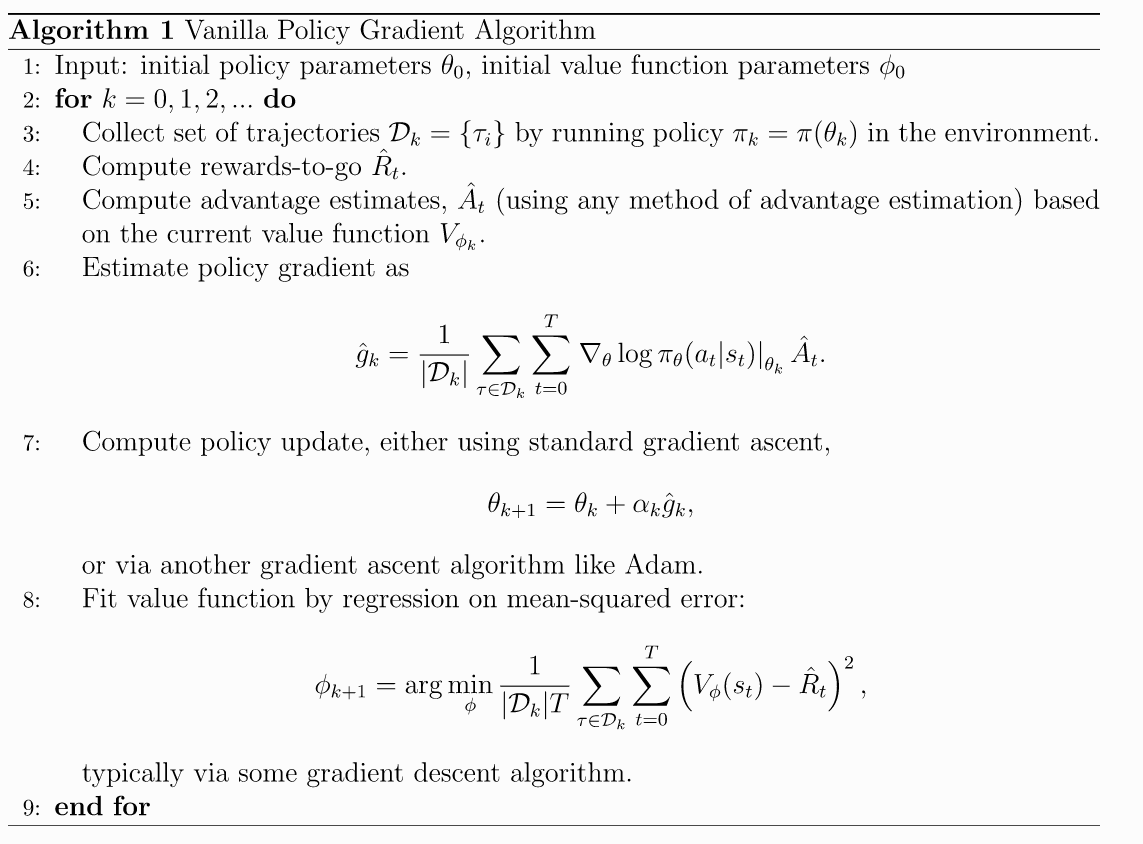
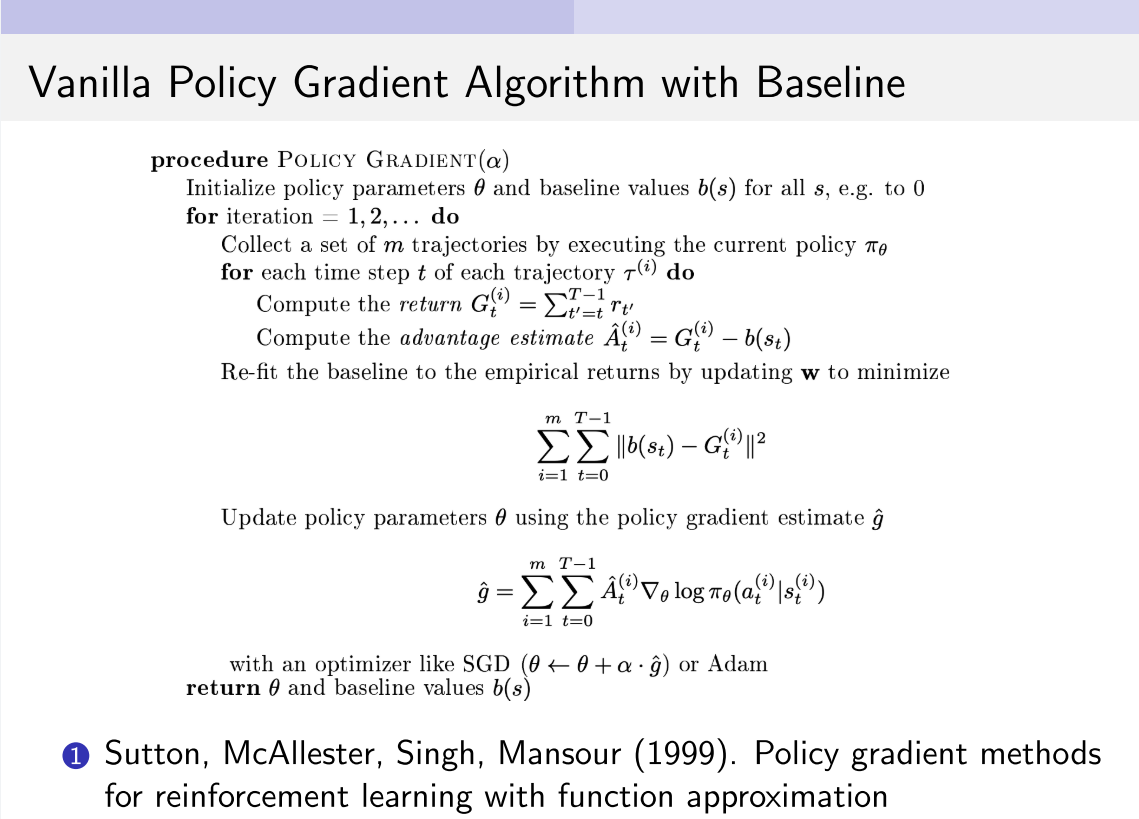
伪代码
VPG使用on-policy训练. 意味着它基于最新随机策略抽样动作进行探索. 动作选择的随机性取决于初始条件和训练过程.
但是更新规则鼓励exploit rewards, 所以动作随机性会降低.
这使得算法收敛速度比较快, 但是容易陷入局部最优.
参考文献
- Policy Gradient Methods for Reinforcement Learning with Function Approximation, Sutton et al. 2000. Sutton Book经典.
- Optimizing Expectations: From Deep Reinforcement Learning to Stochastic Computation Graphs, Schulman 2016(a). 第2章介绍了策略梯度理论, 包括伪代码.
- Benchmarking Deep Reinforcement Learning for Continuous Control, Duan et al. 2016. 最新Benchmark论文, 比较了VPG(如NN+Adam)与其他RL算法.
- High Dimensional Continuous Control Using Generalized Advantage Estimation, Schulman et al. 2016(b). 本文实现的VPG用广义优势估计(GAE)来计算PG.