4 周博磊RL-5-值函数逼近
1 TD与MC
- MC
- G是无偏的, 但是是对真实V值进行noisy采样, 所以方差大;
- E[Gt]=v(st)
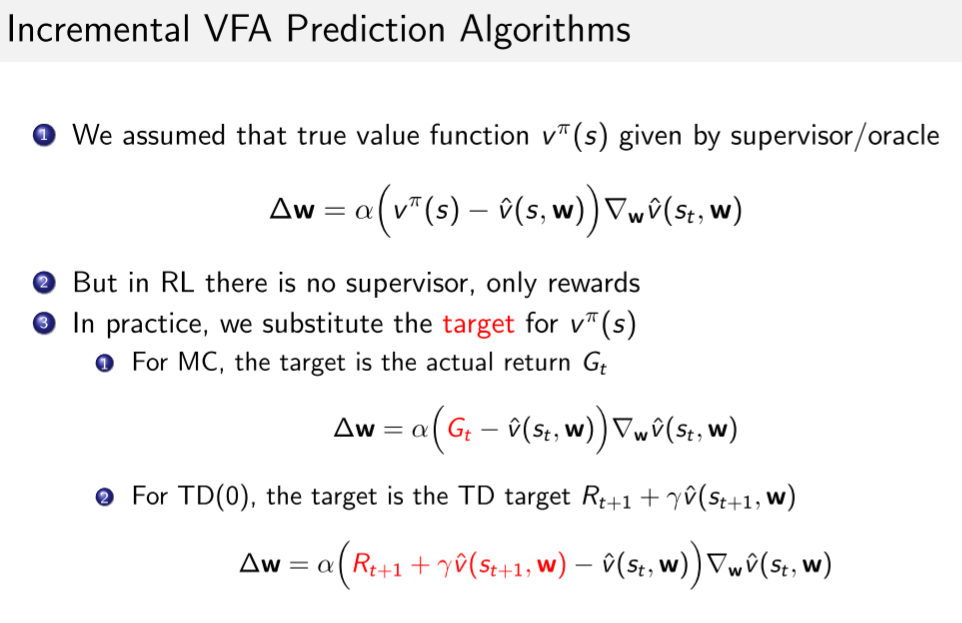
- 线性: Δw=α(Gt−v^(st,w))▽wv^(st,w)=α(Gt−v^(st,w))x(st)
- TD
- TD target Rt+1+γv^(st+1,w)是真实V的有偏采样.
- Rt+1+γv^(st+1,w)≠v(st)
- 线性: Δw=α(R+γv^(s′,w)−v^(s,w))▽wv^(s,w)=α(R+γv^(s′,w)−v^(s,w))x(s)
2 基础
3 TD近似的收敛性问题
TD在off-policy和非线性近似的时候为什么不稳定?
以下问题引入了太多误差累积/
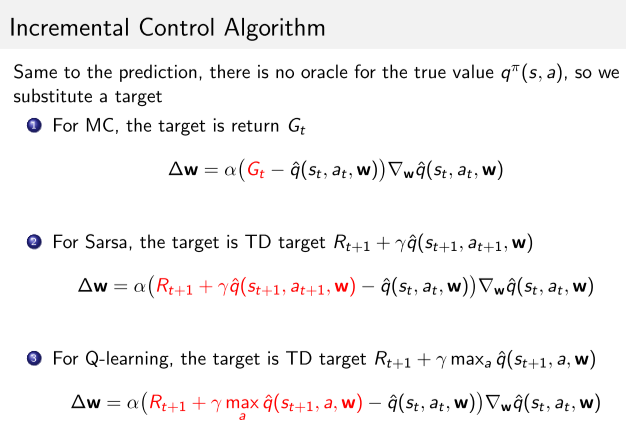
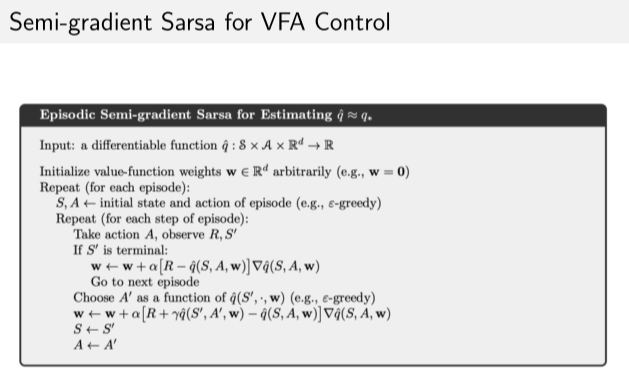
- sarsa或者Q-learning在计算的时候,梯度里也包含了用当前参数计算下一步状态值;
- 同时, 更新过程中设计两个近似过程:
- 用梯度更新近似bellman方程迭代
- 对价值函数的近似
- 在off-policy的时候, 行为策略和目标策略不同, 导致值函数估计不准确
死亡三角
- 函数逼近. 近似引入误差.
- bootstrapping. 比如TD,也是引入噪声; 而MC方法相对好,因为是无偏的,不用bootstrapping.
- off-policy. 行为策略和目标策略不同, 可能导致miss online ,也是引入不确定因素
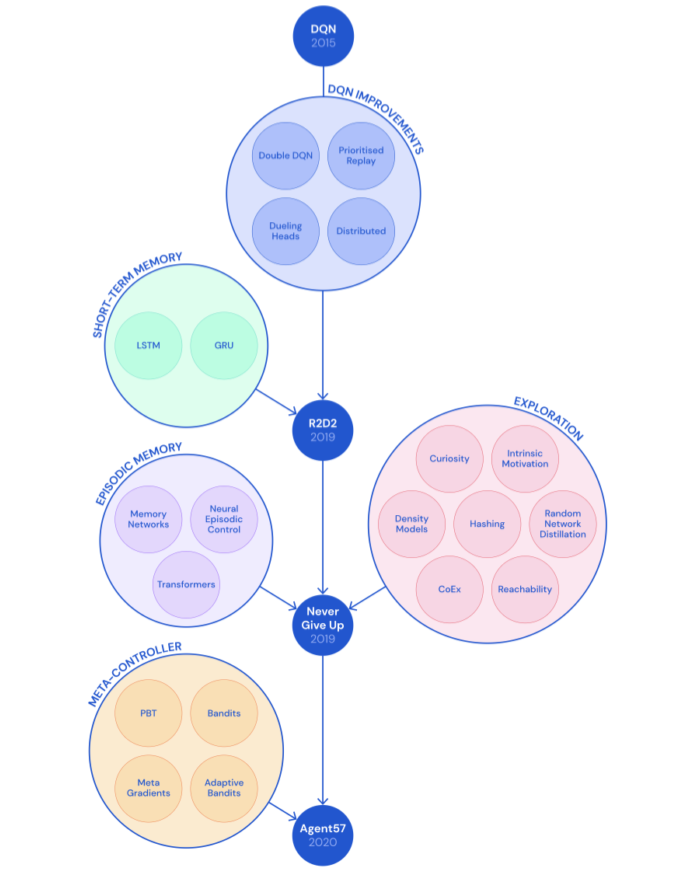
DQN及其改进
算法
DQN 算法
实现和demo
1 Demo of Breakout by DQN
2 Demo of Flappy Bird by DQN
3 Code of DQN in PyTorch
4 Code of Flappy Bird
改进
Agent57
代码示例
作业1
https://github.com/cuhkrlcourse/RLexample/blob/master/modelfree/q_learning_mountaincar.py
tutorial on the relevant algorithms