4 QTRAN
QTRAN: 基于Transformation机制的协作多智能体强化学习值分解方法
论文:Learning to Factorize with Transformation for Cooperative Multi-Agent Reinforcement learning
1 概述
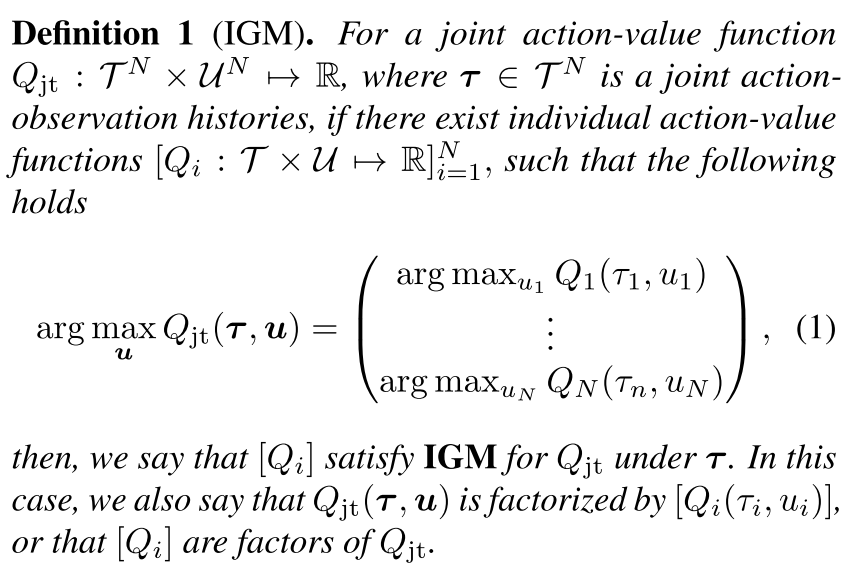
定义: IGM (Individual-Global-Max)
算法演变:
- 去中心化方法, 可扩展性好, 但是存在不稳定问题;
- 中心化方法: 可以解决非稳定问题, 但是随智能体增加, 复杂性爆炸;
- MADDPG: 学习在连续动作空间的分布式策略;
- COMA: Actors用联合critic估计反事实baseline解决信用(贡献)分配问题;
- 值分解方法: 解决联合Q值随着智能体数量增加, 复杂性爆炸增加的问题,
- VDN: 加性约束,

- QMIX: 单调性约束.

本文目标:
可分解任务定义为, 联合Q值取得最优动作也是个体Q值得最优动作. 使用加性限制和单调性限制有点过度限制了, 限制了智能体的种类;
本文把原始联合Q值函数Qjt转换为新的Qjt′, 使其与Qjt具有相同的最优动作, 并解除加性/单调性约束.
本文贡献:
- 通过学习一个状态值函数(用来更正部分观察带来得偏差), 把原始联合动作值函数转化为新的易分解形式, 且最优动作保持相同;
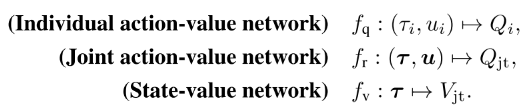
- QTRAN算法: 联合动作值网络、个体动作值网络、状态网络, 定义每个网络的loss函数;
- QTRAN变体: QTRAN-base和QTRAN-alt
- 不同点: 如何构造非最优动作的转换Q函数
- 收敛速度和稳定性
- 在三个环境测试算法.
2 算法原理
2.1 因子函数[Qi]的充分条件
定义μ¯i=argmaxμiQi(τi,μi)表示最优动作, u¯=[μ¯i]i=1N; 令Q=[Qi]∈RN, 即Qi,i=1,...,N的列向量.
定理1 给出[Qi]满足IGM的条件.
| 一个可分的联合Q值函数Qjt(t,u), 可以被[Qi(τi,μi)]分解, 当 |
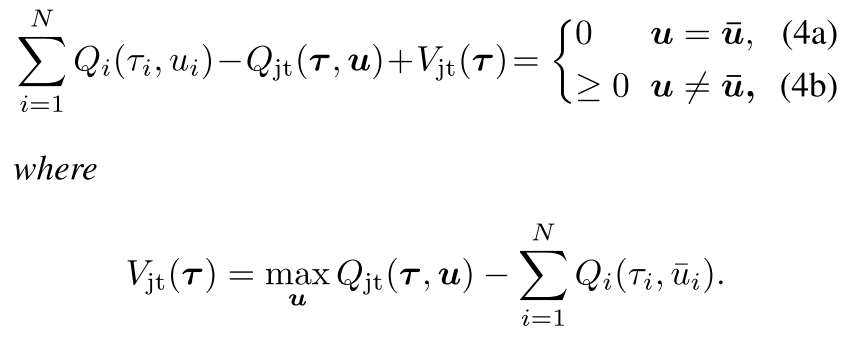 |
注意, (4)中的条件在仿射变换的情况下是必要的. 也就是说, 存在一个仿射变换ϕ(Q)=A⋅Q+B(其中A=[aii]∈R+N×N是aii>0的对称对角矩阵, B=[bi]∈RN), 使得当Qjt可以被[Qi]分解时, 把Qi替换成aiiQi+bi时, 则(4)成立. 这是因为对于所有的i, bi都抵消掉, aii仅仅作为∑i=1NQi的缩放因子, 因为IGM是不变的.
变换分解:首先定义加性的变换联合Q值函数,
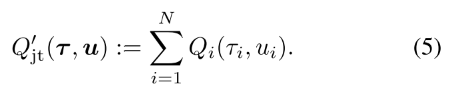
通过加性结构, [Qi]满足Qjt′ 的IGM, 那么它就是Qjt′的分解个体Q值函数. 因为argmaxuQjt(t,u)=argmaxuQjt′(t,u), 找到[Qi]满足(4)就是Qjt′(t,u)的分解.
函数Vjt(t)用来修正中心化联合Q函数Qjt和[Qi]的和的偏差. 偏差是智能体部分观察带来的. 如果加入了全局观察, Vjt可以设为0.
2.2 算法
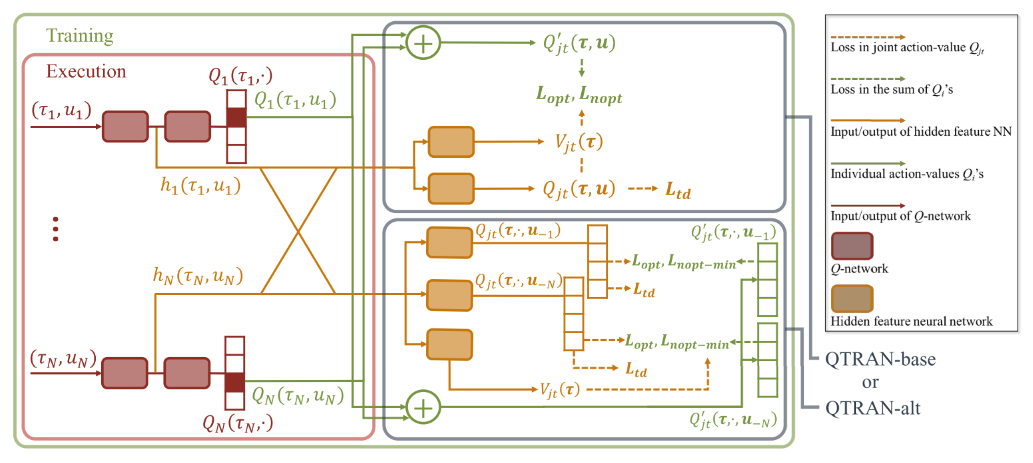 |
| Figure 1. QTRAN-base and QTRAN-alt Architecture |
QTRAN包含三个独立的估计器: 每个智能体i的独立Q值网络, 联合Q值网络(可以分解为Qi), 状态价值网络
在Individual action-value network中, 每个智能体i的Q值加和得Qjt′;
联合Q网络: 逼近Qjt, 输入为选择的动作, 输出为该动作得Q值.
- 首先使用所有个体Q网络采样的动作向量来更新联合Q网络. 因为联合动作空间UN, 找到最优联合动作复杂度很高, 而每个个体的最优动作取argmax就行, 是线性的.
- 第二, 联合Q网络共享个体网络低层的参数, 联合Q网络把个体网络隐层特征加和整合∑ihQ,i(τi,ui), 其来自于hi(τi,ui)=[hQ,i(τi,ui),hV,i(τi)].(使用此参数共享样本效率高, 可进行可扩展的训练, 但会牺牲表达能力.)
状态值网络: 计算标量状态价值, 类似与dueling网络的V(s).
- 用来在计算argmax时匹配Qjt和Qjt′+Vjt. 没有V, 部分观察可能限制Qjt′的表达复杂性;
- 给定t, 状态值独立于选择的动作, 因此对动作选择没有贡献, 所以使用公式(4)代替.
- 输入也是个体网络隐特征的组合∑ihV,i(τi)
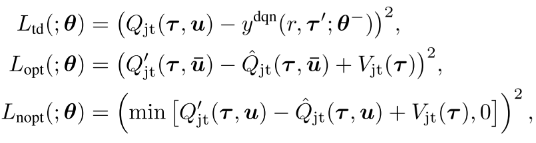
2.3 损失函数 QTRAN-base
目标:
- 训练联合Q值Qjt估计真实动作值;
- 变体值函数Qjt′应该追踪到联合Q值Qjt, 使其最优值相等.
- 使用目标网络和replay buffer

其中
- r是在观察τ执行动作u转移到τ′的奖励.
- Ltd学习Qjt, 通过最小化TD误差估计真实Q值;
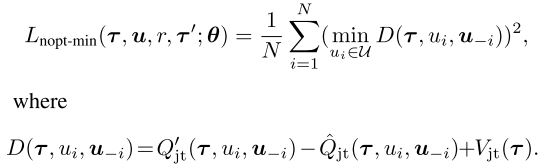
- Lopt和Lnopt为了在把Qjt分解为[Qi]时满足条件(4).
- Lnopt用来在每一步检查样例中选择的动作是否满足(4b), Lopt检查最优局部动作是否满足(4a).
- 根据网络对样本中动作满足(4a)或(4b)的程度定义损失, 实现(4); 但是验证(4a)需要太多样本, 因为最优动作很少, 需要大量采样.
- 因为目标是学习Qjt′和Vjt分解给定的Qjt, 本文在学习Lopt和Lnopt时通过固定Qjt稳定学习.
2.4 QTRAN-alt
使用一种反事实方法, 前述定理1通过(4a)强化IGM, 通过(4b)确定个体Q值[Qi]和状态值Vjt如何跟踪Qjt, 控制构造函数的稳定性.(4b)过于稀疏导致不能构造正确的分解形式, 也就是说, (4b)对于非最优动作施加了坏的影响, 反过来影响稳定性和收敛速度. 关键在于如何在非最优动作处应强化什么条件.
定理2
| 定理1及其必要条件通过替换(4b)为(7)成立: |
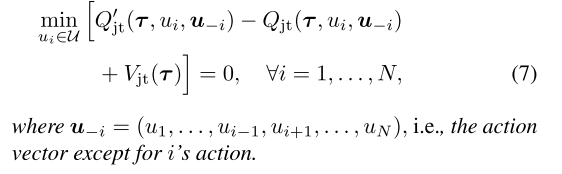 |
条件(7)在遵循定理1的同时令至少一个动作为0, 条件比(4b)更强.(4b)要求对任意τ, Qjt(t,u)−Vjt(t)≤Qjt′(t,u)≤Qjt′(t,u¯), 此时可能存在Qjt′(t,u)和Qjt′(t,u¯)相近, 但是Qjt(t,u)比Qjt(t,u¯)小很多. 带来不稳定.
条件(7)限制了上述问题, 加宽了Qjt(t,u)和Qjt(t,u¯)之间的gap.
QTRAN-alt网络只用一次前向, 就可以计算所有i的Qjt(t,⋅,u−i)和Qjt′(t,⋅,u−i).
因此, 每个智能体都有一个反事实联合网络, 给定其他智能体的动作, 其对于每个可能动作的输出为Qjt(t,⋅,u−i). 从其他智能体得到hv,i(τi)和合并隐特征∑j≠ihQ,j(τj,uj).
最后, 对于所有智能体, Qjt′(t,⋅,u−i)=Qi(τi,⋅)+∑j≠iQj(τj,uj). 通过损失函数用Lnopt−min代替Lnopt实现:
2.5 矩阵游戏说明VDN和QMIX无法达到联合最优
该游戏是合作MARL问题, 且不满足加性或者单调性约束, QTRAN成功学习联合Q值, VDN和QMIX不能.
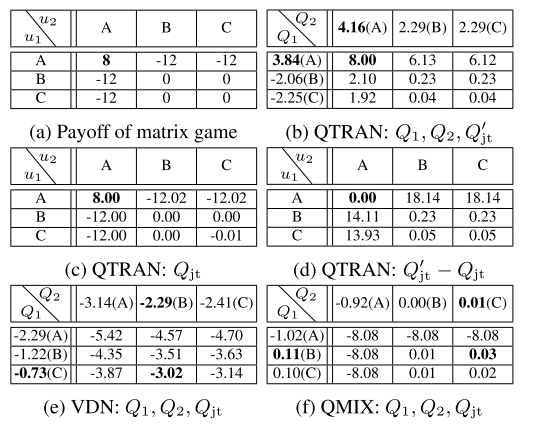 |
| 表1, 在矩阵游戏中重构联合Q值的结果 |
在有21个动作的矩阵游戏中测试QTRAN-base和QTRAN-alt.
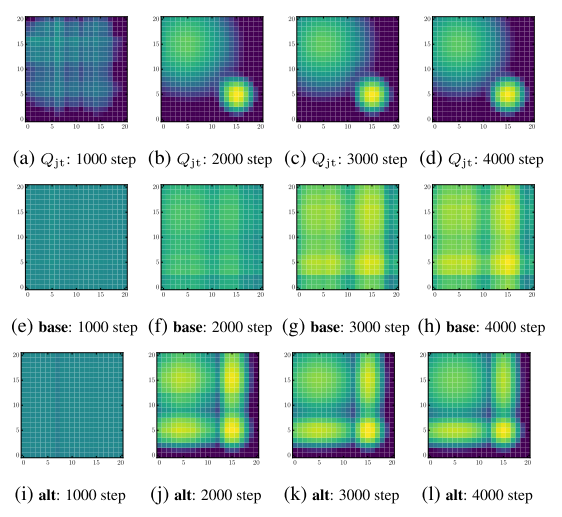 |
| 图2, (a-d)表示Qjt, (e-l)表示Qjt′ |
表明两个算法都学会了最优动作, alt算法在非最优点估计更准确.
3 实验
3.1 多域高斯压缩Multi-domain Gaussian Squeeze (MGS)
GS是简单非线性多智能体资源分配问题, 多个同质智能体分配资源同时避免拥塞. 本文使用MGS:
- 有10个智能体
- 每个智能体i执行动作ui, 控制资源利用等级(0-9); 每个智能体都有自己的单元级的资源数量, si∈[0,0.2], 作为环境先验;
- 联合动作u决定整体资源使用x(u=∑isi×ui)
- 假设有K个域需要分配资源, 目标是最大化联合奖励:G(u)=∑k=1Kxe−(x−μk)2/σk2, μk,σk是域参数. 单域GS只有一个局部最大值, MGS有多个.
- 另外, MGS有一个新的次优"陷阱"策略, 更容易到达, 但是只有最优回报的一半. 当K>1时用来测试算法很有效.
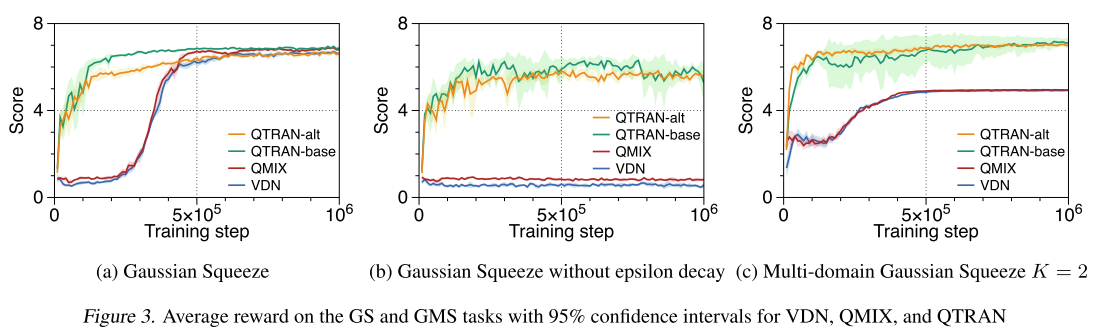
- (a) QTRAN更快, 学习到最优策略. VDN和QMIX的结构性限制, 妨碍学习的准确率, 由于错误的ϵ0decay策略收敛到偏差样本的局部最优点(该点在K=1, 即GS时是全局最优). 为了验证上述假设, 使用完全探索验证.
- (b) QTRAN几乎是相同的策略, 但是VDN和QMIX恶化严重;
- (c) VDN和QMIX学会的是次优策略
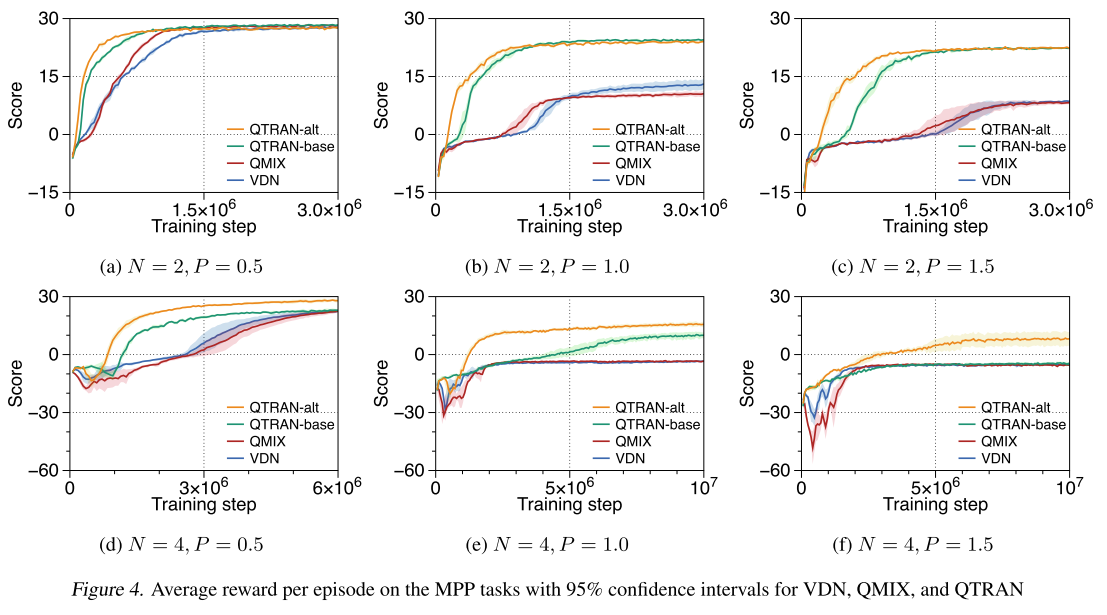
3.2 改进捕食者-猎物游戏Modified predator-prey (MPP)
经典格子游戏, 修改了一些设定:
- 进入视线范围视为捕获, 且只有多个智能体同时捕获猎物才有正向奖励, 要求更高级的合作. 当两个及以上抓住猎物, 奖励1, 当只有一个猎手捕获猎物时, 惩罚-P.
- 注意惩罚P决定了单调程度. P越高, 任务单调性越低
- 猎物随机再生, 游戏固定进行100步, 在6个场景中测试; N=2, 4, P=0.5, 1.0, 1.5; 当N=4时有2个猎物, 否则有1个.
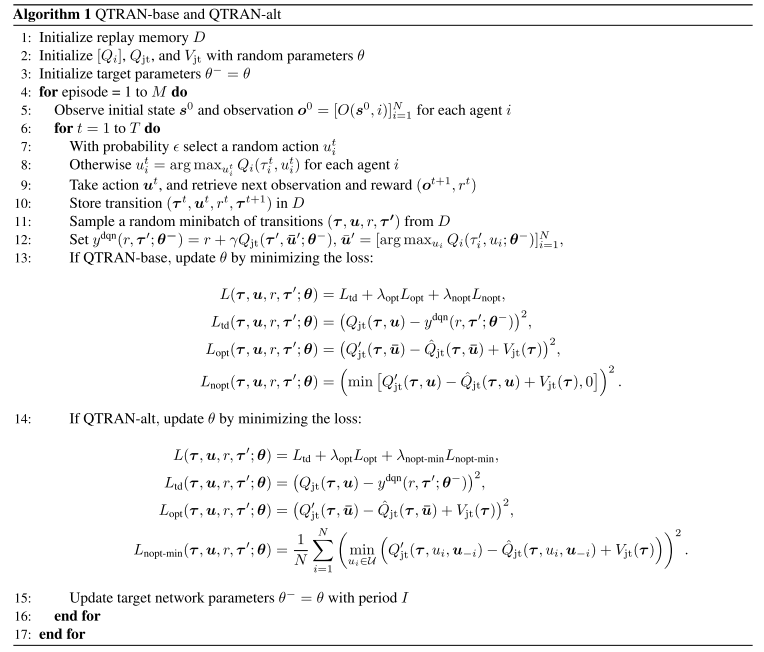
4 附录
4.1 算法伪代码