4 周博磊RL-9-分布式
1 分布式ML
ML并行化有两种方法:
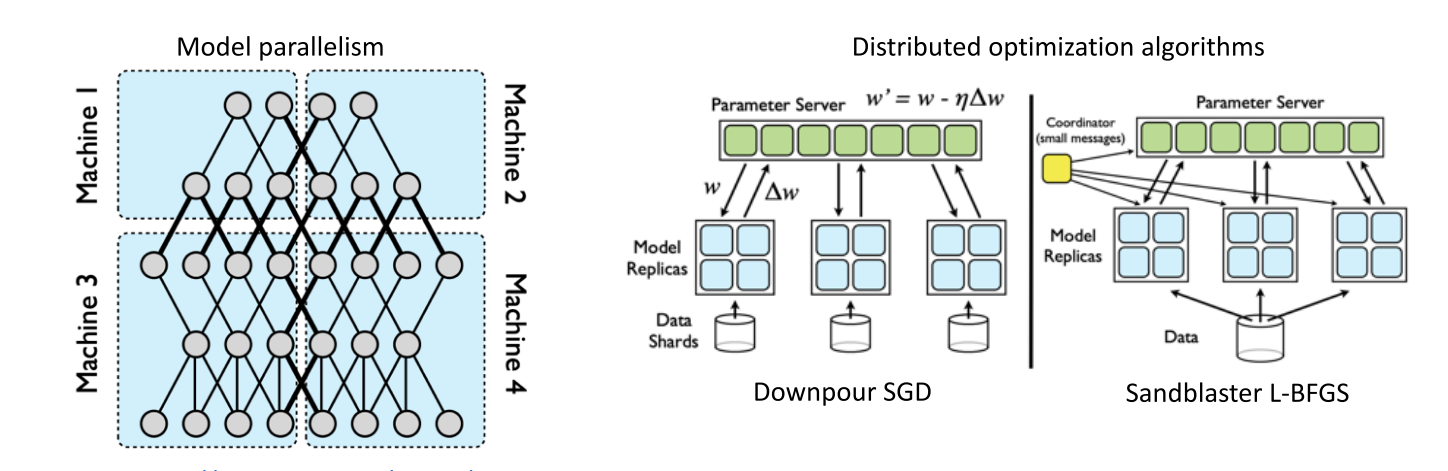
- 模型并行: 不同机器负责网络不同部分的计算
- 数据并行: 不同机器都复制整个模型, 用不同的数据进行计算
- 模型和数据都并行
- 模型一般使用多GPU并行, 然后数据在不同机器上并行
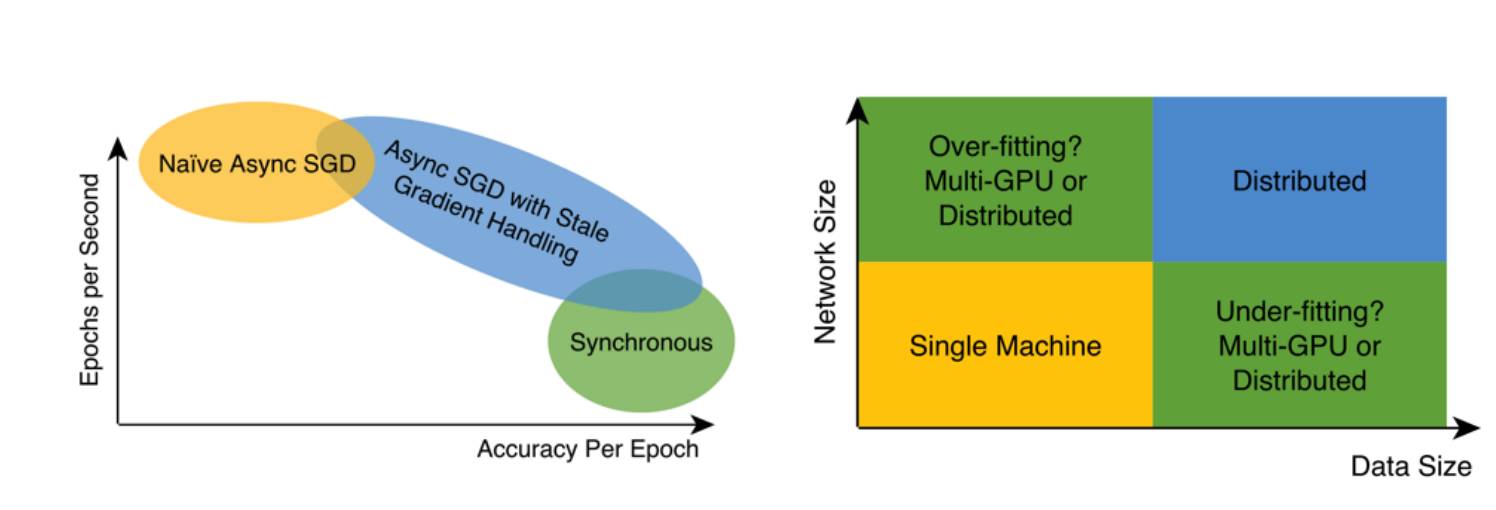
分布式系统一般要平衡并行程度和性能, 一般从一下两个视角进行考虑
1.1 模型参数更新
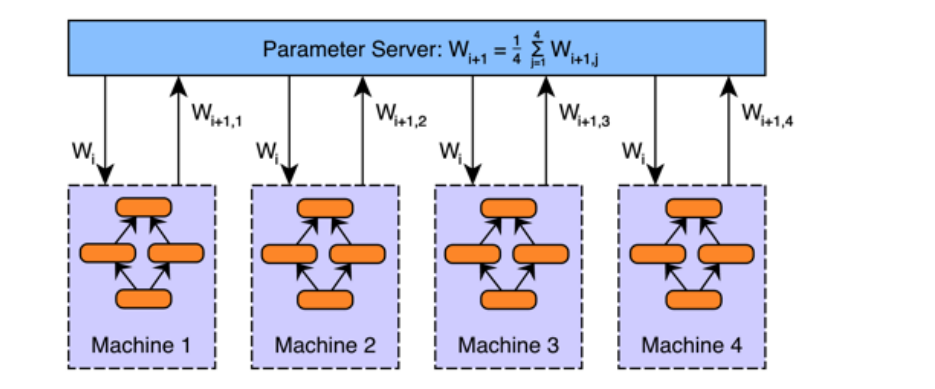
参数平均
- 每个worker都复制当前参数
- 每个worker使用部分数据训练
- 全局参数用所有worker的平均
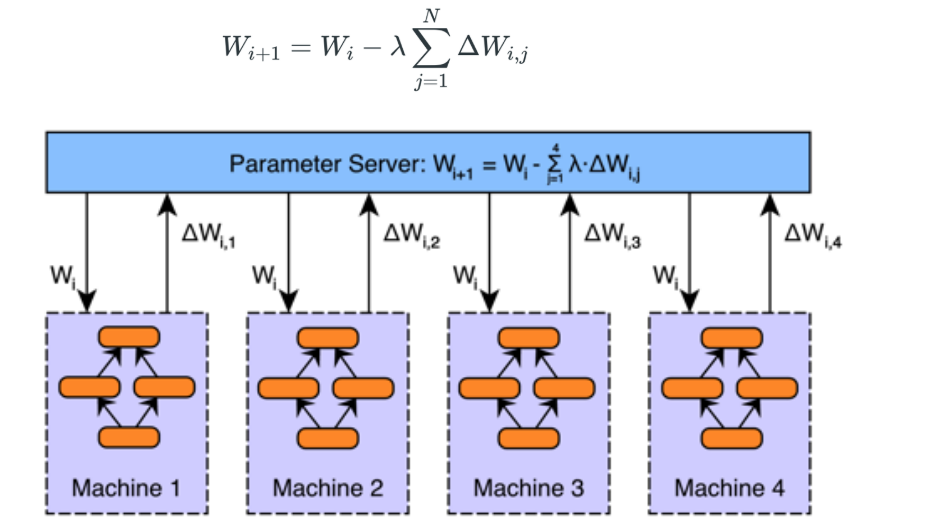
传递梯度
- 直接把每个worker的梯度传给server, 进行加权平均
1.2 模型更新
根据模型更新方法可以分为同步更新和异步更新
- 同步: 智能体并行训练, 所有智能体训完一轮之后, 同时更新所有模型.
- 必须等最慢的那个训完才能更新
- 异步: 全局网络用单独的worker更新, 不用等所有的智能体都训完一轮在更新
- 可能会不一致, 性能不如同步的好
- Hogwild: Lock-free asynchronous SGD, 证明了异步SGD性能可以接近同步算法

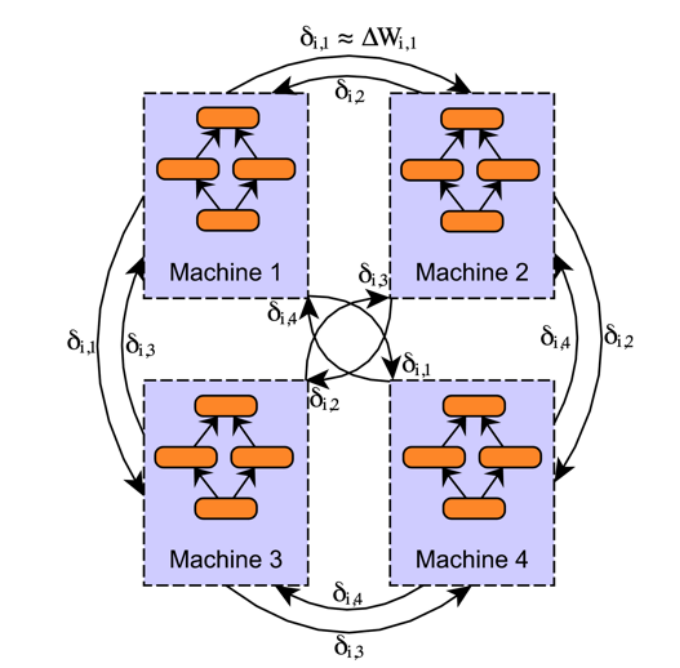
Decentralized Asynchronous Stochastic Gradient Descend
- 之前的方法都要有一个中心化的sever, 它出错可能导致所有的都出错
- 使用p2p通信, 去中心化地更新参数
- Scalable distributed dnn training using commodity gpu cloud computing.
1.3 分布式系统case
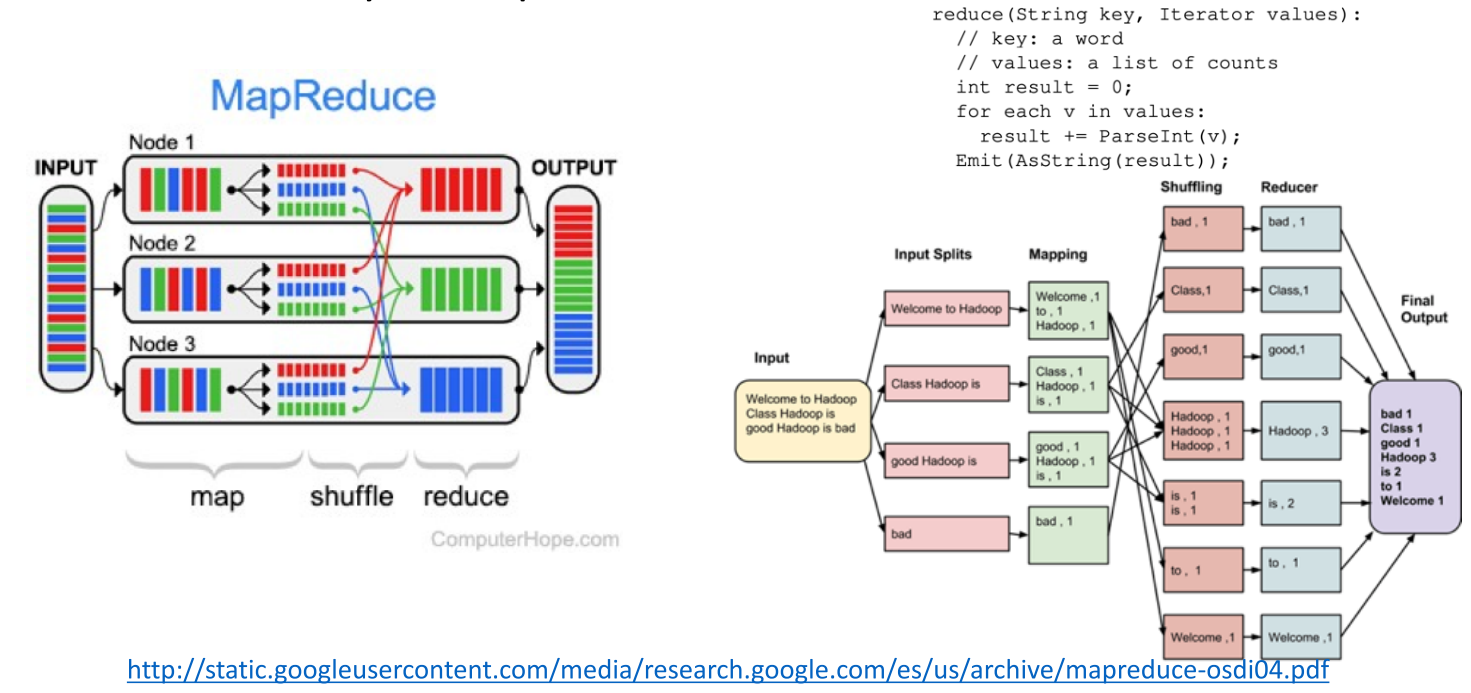
MapReduce
DisBelief
- GooGle 分布式学习系统
- 在CPU上的模型并行和数据并行的结合
- paper
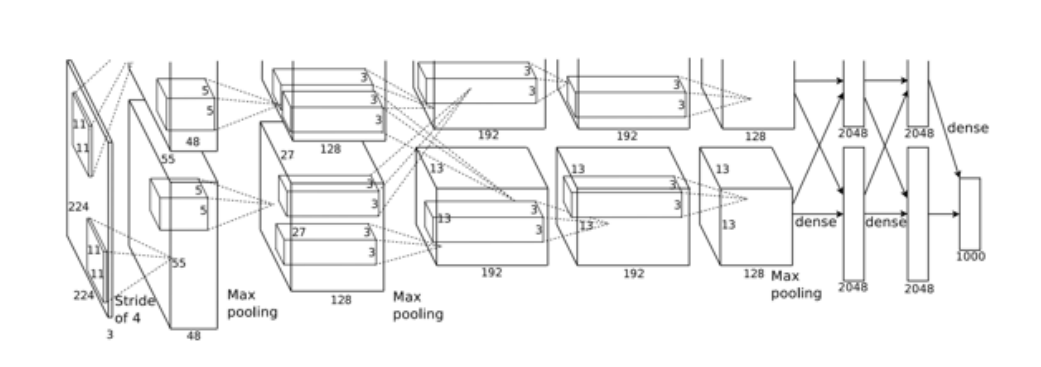
AlexNet
- 由于当时显存限制, 模型在实现时, 把kernel分成了两部分, 在两块显卡上计算
2 分布式RL
多个agent, 多个env, 每个env多个episode
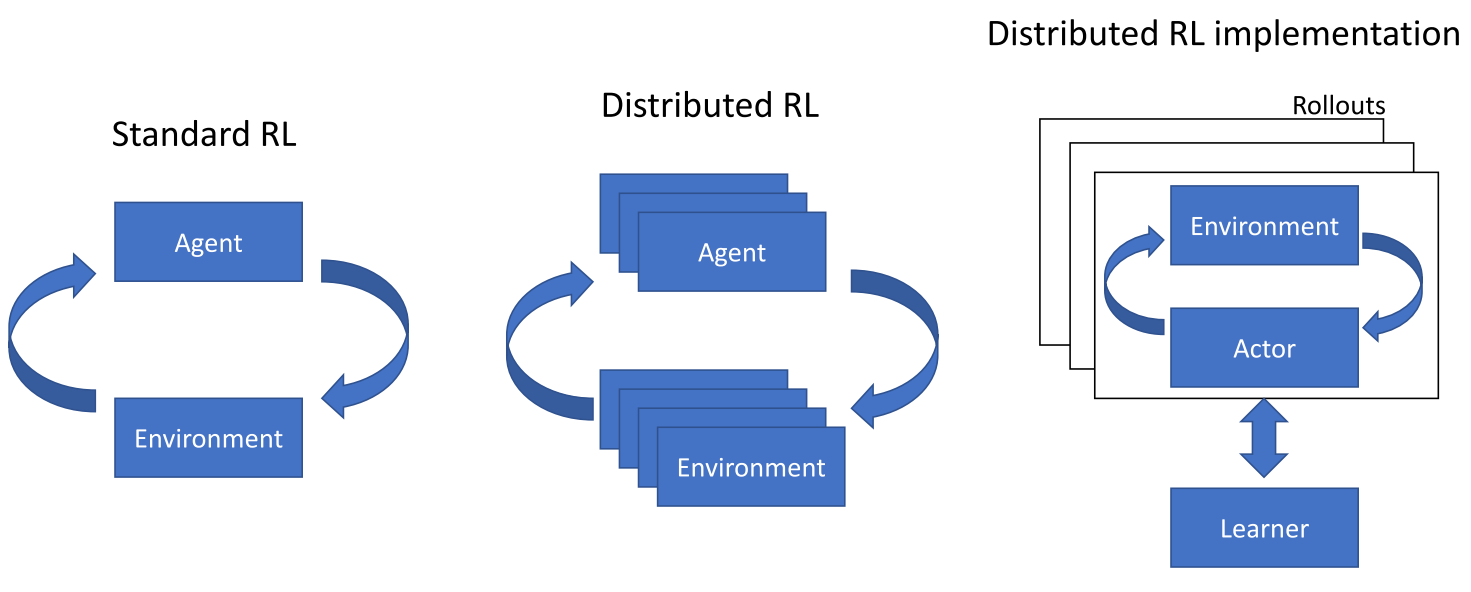
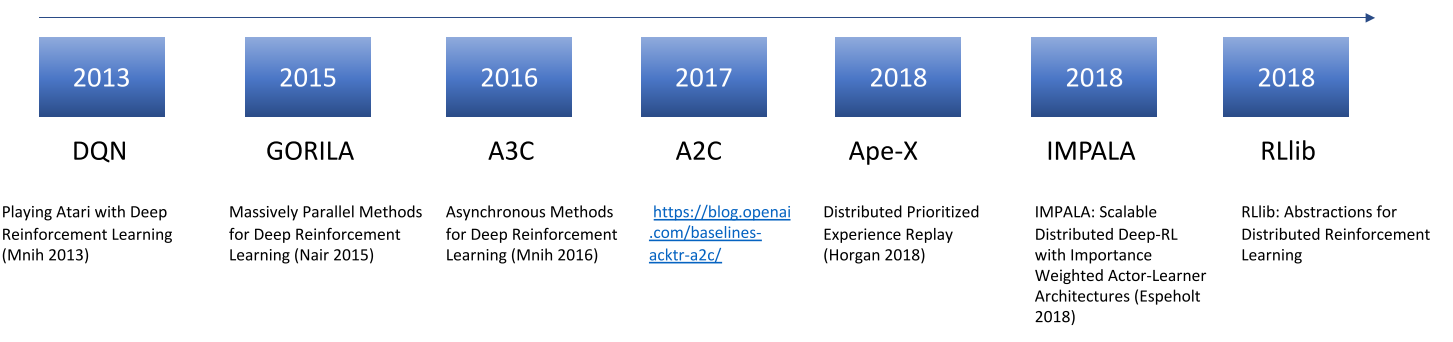
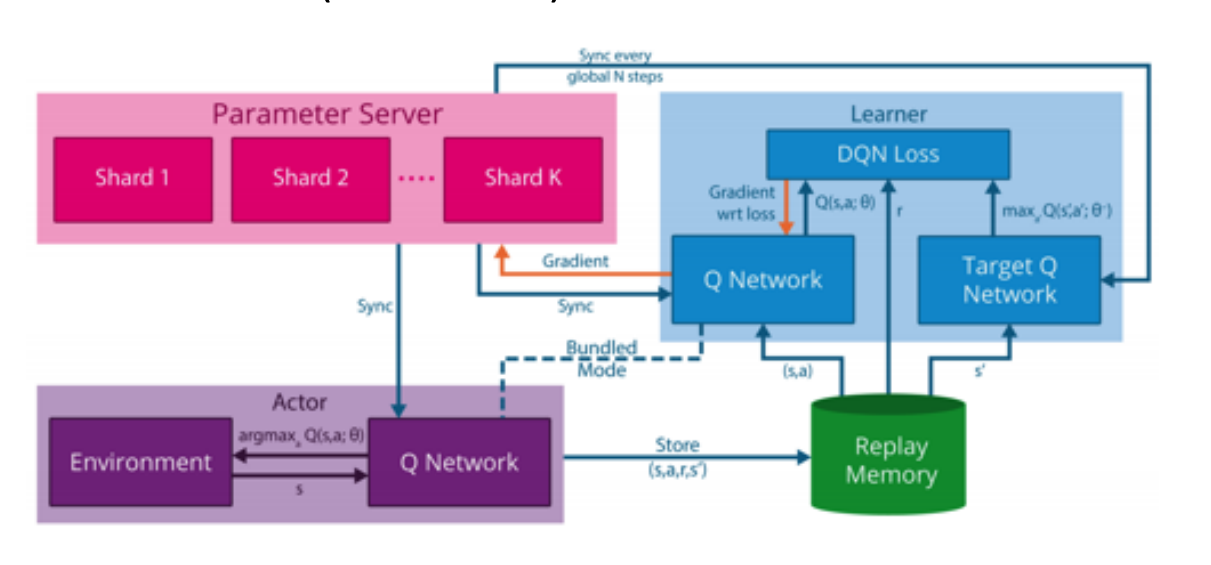
2.1 General Reinforcement Learning Architecture (GORILA)
- DQN: 单智能体, 单机, 单个环境, 效率很低
- GORILA:
- 多机, 其中一个parameter server
- 需要reply memory: 多个actor产生大量数据传到replay-buffer里
- Q网络更新使用参数server机制进行更新.
- deepmind-paper
2.2 A3C/A2C
AC:
- Critic使用Qlearning更新
- Actor使用Q值计算梯度:

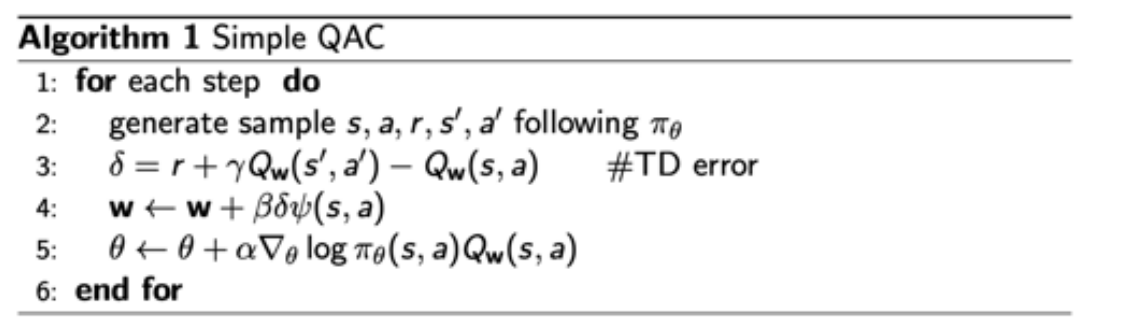
AAC(Advantage AC)
- 用V作为baseline计算优势函数A.
- 用A计算策略梯度
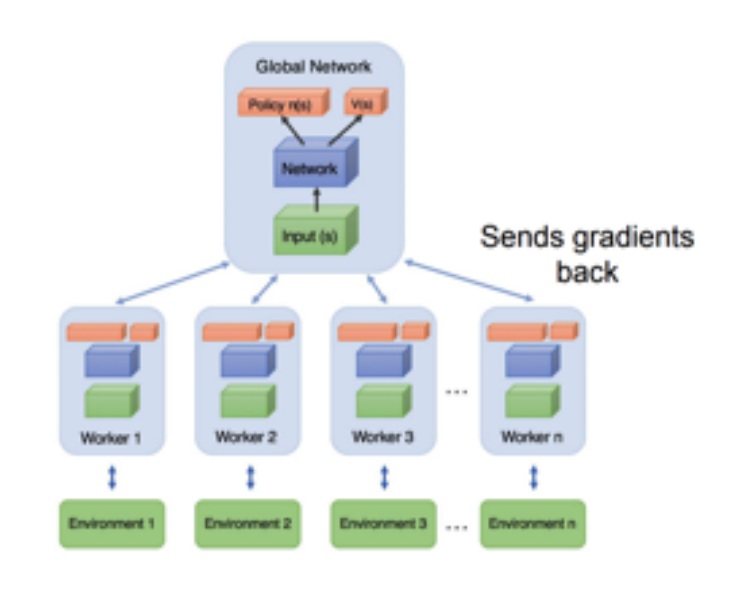
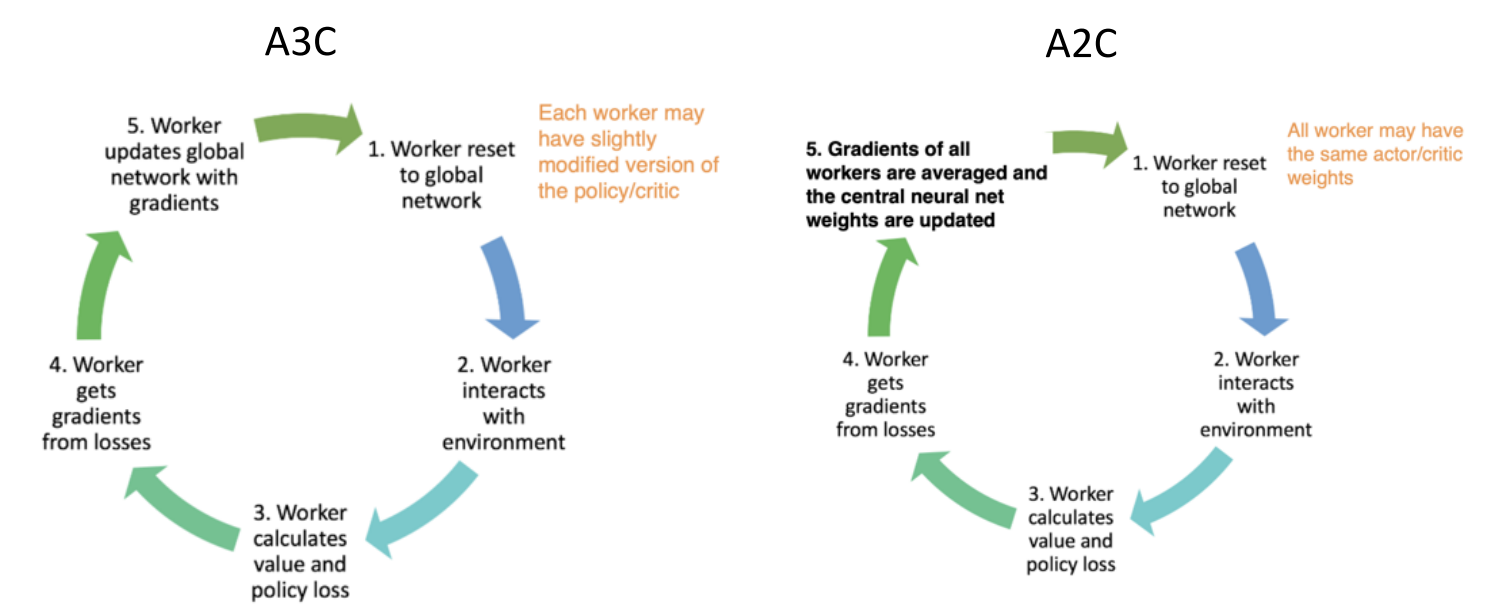
A3C (Asynchronous Advantage Actor Critic):
- 单机多CPU线程异步变体 1-step Sarsa, 1-step Qlearning, n-step Q-learning, AAC.
- 用多个并行的Actor进行探索
- 由于智能体的多样性, 不需要reply memory稳定训练
- 不需要线程锁
- 为什么Asynchronism有用?, 异步会引入噪声, 可以提供探索性和正则化.
- 如何用GPU对A3C 加速? A2C
A2C
- 多CPU线程+GPU加速
- Synchronous版本: 等每个actor训完, 然后取平均.
- 可以使用GPU提升效率(large batch sizes)
- 因为使用的同步更新, 每个actor的参数也更准确
- 代码
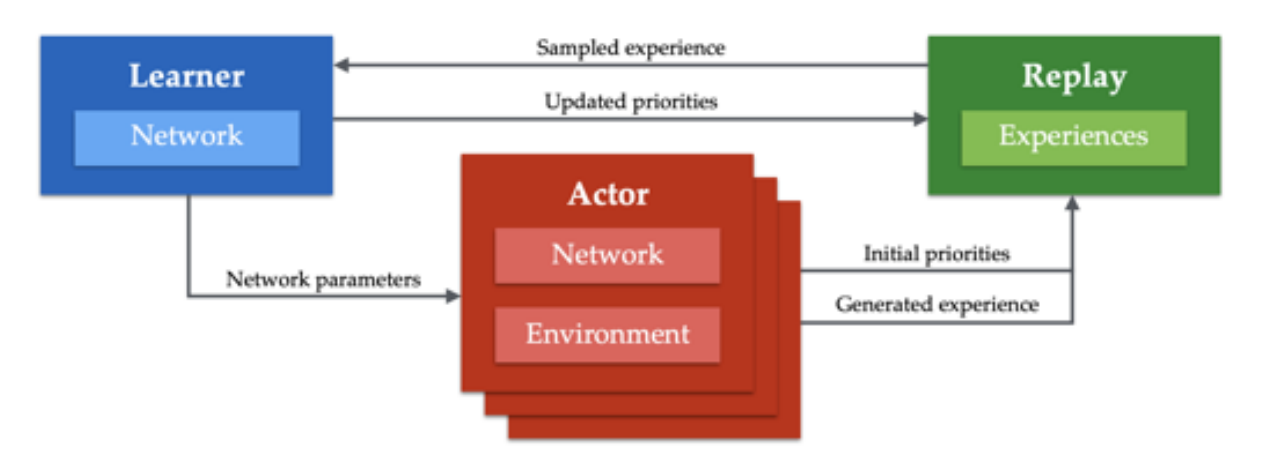
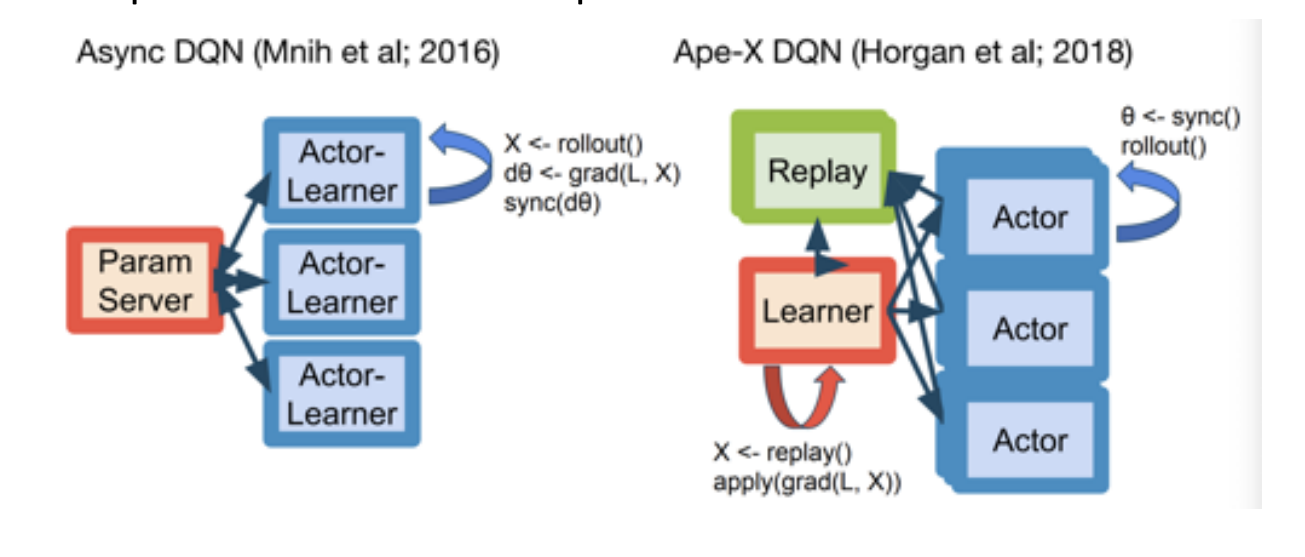
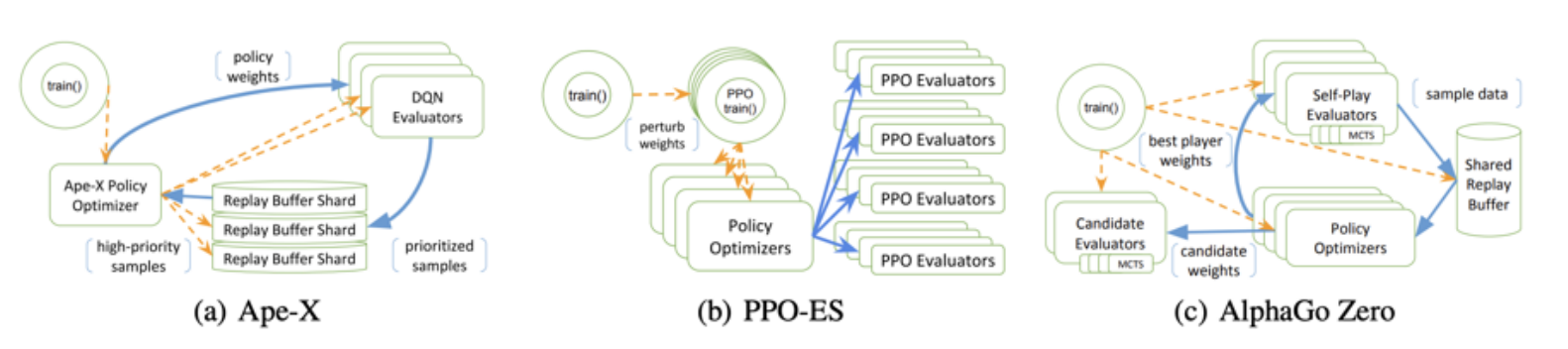
Apex-X (Distributed Prioritized Experience Replay): 多机版本的分布式DQN/DDPG
- A2C/A3C 在多机上不好扩展
- RL收集rollout数据比较难, Apex-X使用并行Actor与环境交互, 收集大量数据来加速训练
- 一个learner更新参数, 再把参数复制给多个Actor进行rollou来收集数据
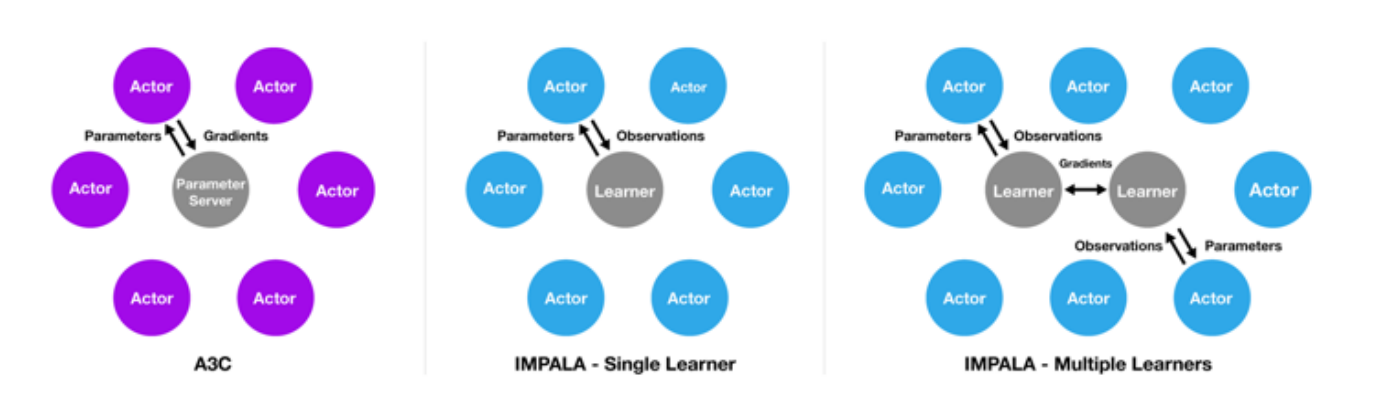
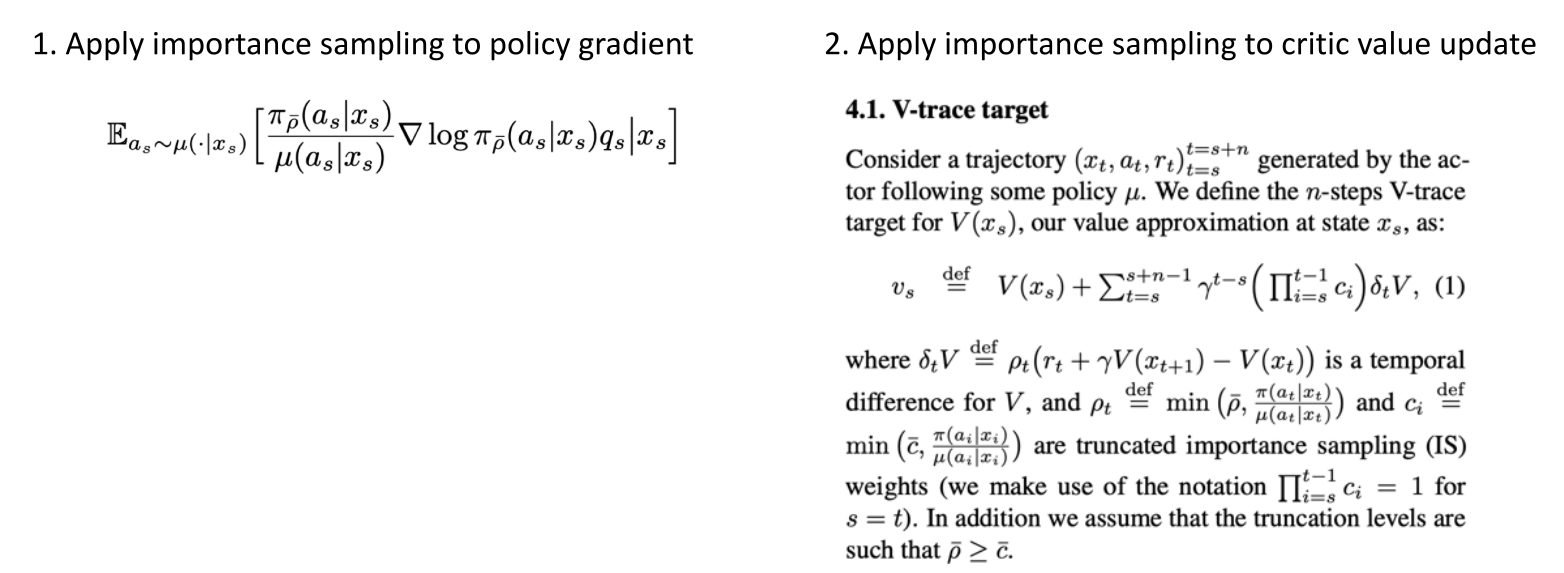
- IMPALA (Importance Weighted ActorLearner Architecture)
- 一种异步(Asynchronous)的设计, 效率比A2C 高
- Actor只用来收集数据, 没有梯度
- Actor之间互相独立, 因为每个Actor保留的参数不同, 所以使用重要性采样对不同Actor采样的数据进行加权.
- 对于策略梯度直接使用重要性采样权重
- 对于critic使用V-Trace目标函数
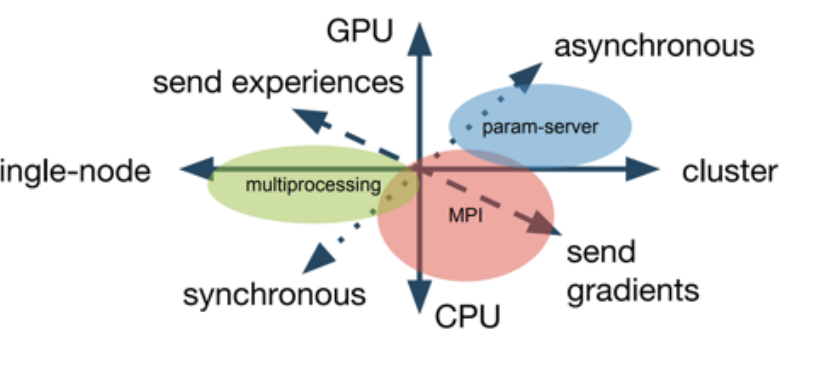
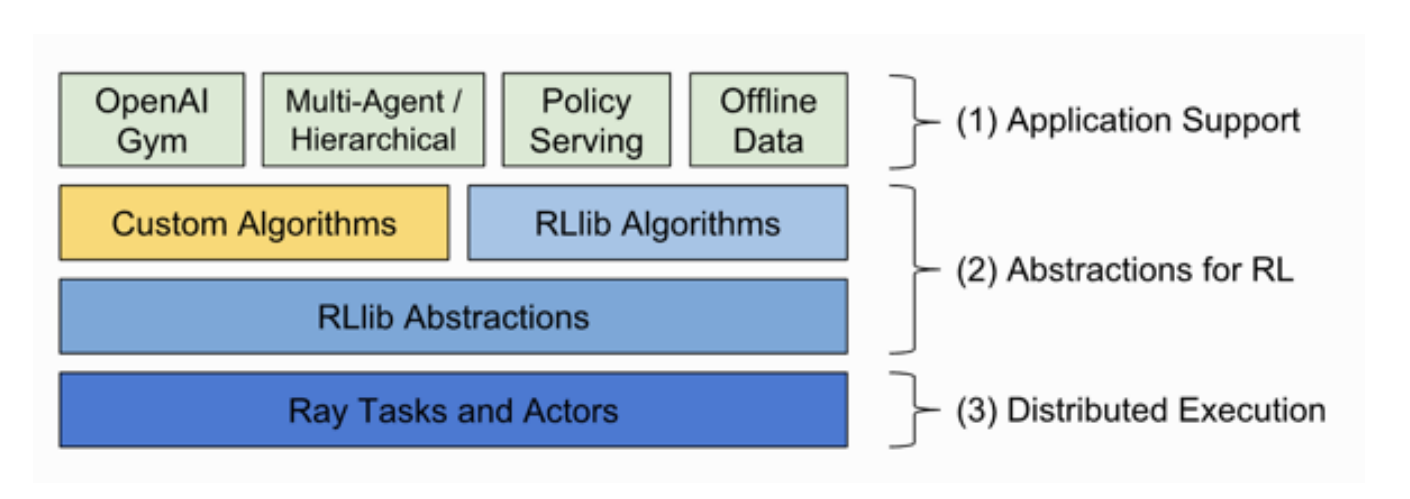
- RLlib: 把不同的分布式方法进行模块化, 可以统一调用和组合不同的分布式思想
- 不同分布式思想可以有GPU/CPU, 单节点/集群两个思考维度
- RLlib可以通过组合不同的模块, 快速实现不同的分布式RL算法
- 在进行系统实现的时候, 通过抽象出不同的层次整合
- 可以很快地搭建不同的复杂系统
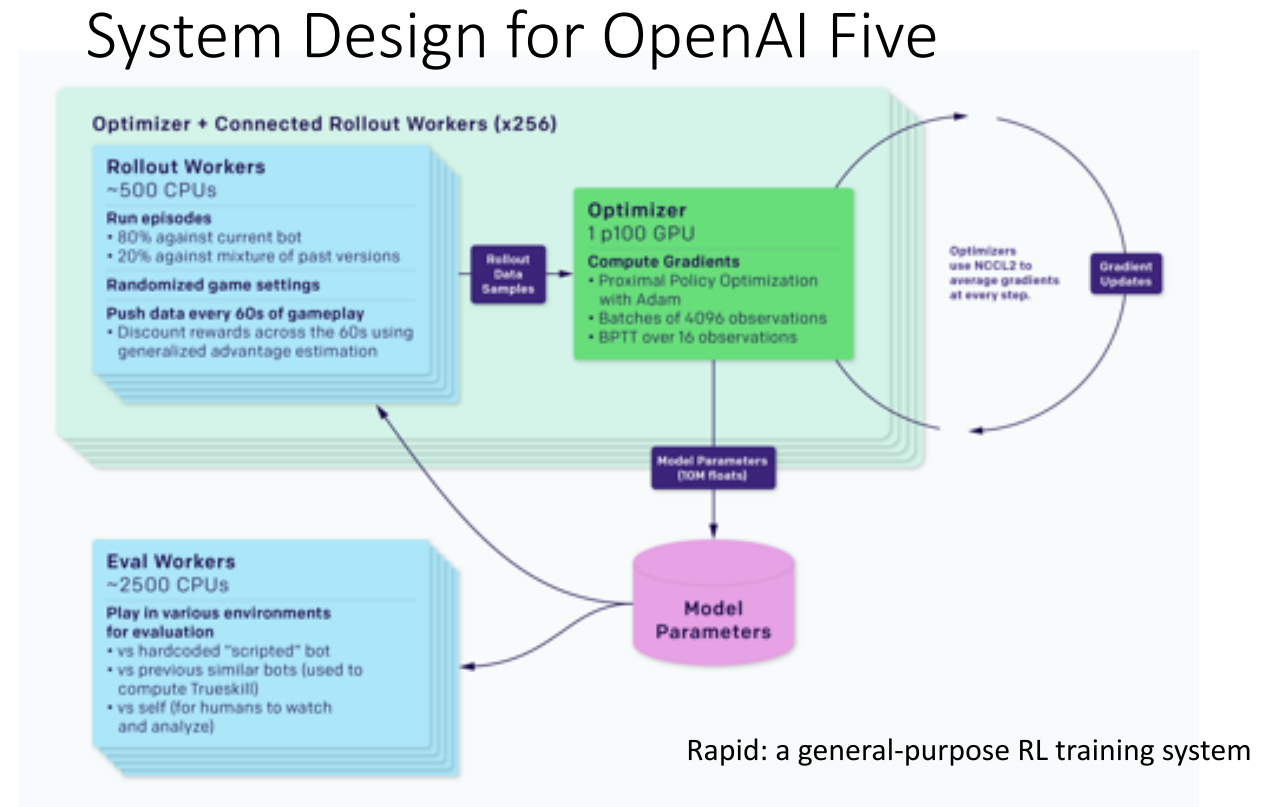
- OpenAI Five