2 spinup-PPO
是一种直接简单的算法, 算是OpenAI的御用算法.
核心: 如何提高数据利用率, 最大化策略提升步骤, 同时保证性能函数不崩溃.
PG算法的缺点:
- 对lr敏感, 太小慢, 太大噪声让算法不收敛, 性能崩溃;
- PG在高维空间需要频繁采样.
创新:
- 主要是基于TRPO的改进.
- 采样, 打破on-policy采样的样本效率低的限制
- 首先TRPO提供了理论保证, 就是新策略更新后的性能比旧策略保证单调不减, 又为了不让新旧策略偏离太远, 使用新旧策略的KL散度作为约束项, 整个问题是带约束的优化问题. PPO是对TRPO的简化, 也能得到TRPO差不多的理论保证, 但TRPO使用二阶方法, PPO使用一阶方法保持新旧策略保持一致.
- 基本的PPO把KL散度项作为惩罚项加到loss里, 但是引入了新的超参数. 所以作者提出了一种简化方法, 就是直接在新旧策略的比值过大的时候, 对梯度做clip. 就有了他的目标函数
- 另外为了提高数据利用率, 使用了重要性采样, 这一块也是直接从TRPO继承来的. 同时它也可以进行数据重用.
- 最后就是它使用GAE估计优势函数, 这种多步方法可以减少方差和偏差; 也可以基于A3C算法进行并行化.
核心算法性质:
- PPO是on-policy算法;
- 适用于离散和连续动作空间环境;
- 支持MPI实现并行化.
速览
算法版本
- PPO-Penalty: 把KL散度作为目标函数的惩罚项, (TRPO使用带约束的优化问题), 并在训练过程中自动调整惩罚系数.
- PPO-Clip: 没有对KL散度的惩罚, 而是直接对目标函数进行clip, 让新旧策略不会偏离太远.
核心公式
参数更新过程为,
θk+1=argθmaxEs,a∼πθk[L(s,a,θk,θ)]
使用SGD更新的目标函数为
L(s,a,θk,θ)=min(πθk(a∣s)πθ(a∣s)Aπθk(s,a),clip(πθk(a∣s)πθ(a∣s),1−ϵ,1+ϵ)Aπθk(s,a)),
其中ϵ表示新旧策略最多离多远的超参数. 上式有一个简单版本:
L(s,a,θk,θ)=min(πθk(a∣s)πθ(a∣s)Aπθk(s,a),g(ϵ,Aπθk(s,a))),
其中
g(ϵ,A)={(1+ϵ)A(1−ϵ)AA≥0A<0.
- 当A>0, 鼓励当前行为, 但是不让策略偏离太远
- 当A<0, 减少当前行为, 所以不让它大于(1−ϵ)
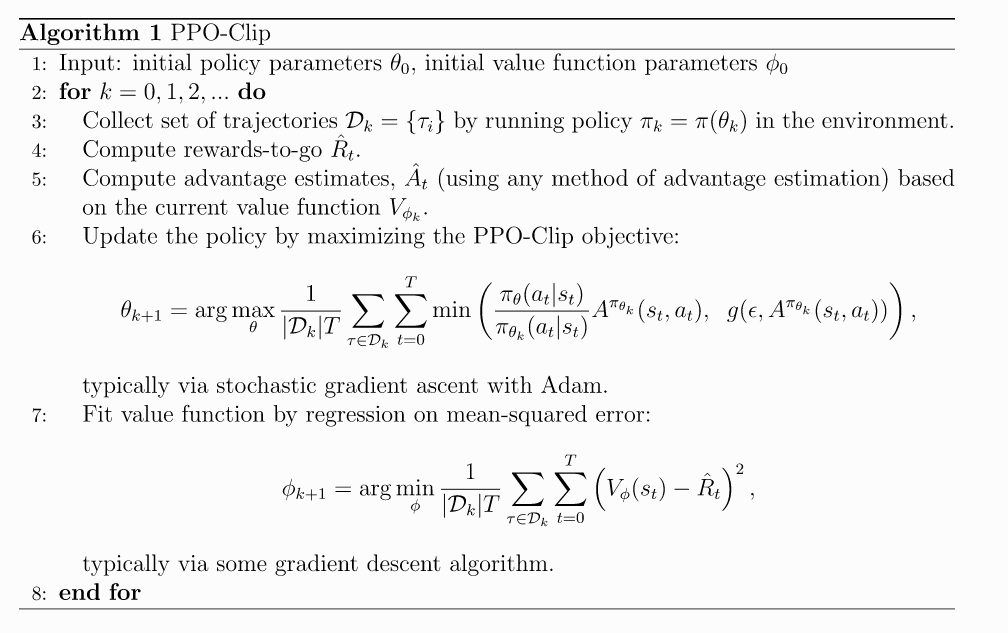
伪代码
PPO是一种on-policy算法, 也就是说算法根据最新版本的策略版本进行动作抽样. 动作随机性来自初始化和训练过程, 但是随着训练更新, 动作随机性会降低, 容易陷入局部最优.