Windows安装mujoco
安装顺序:Anaconda3, Mujoco, Gym,Mujoco-py。安装版本如下:
1. 安装anaconda
默认安装就行,记得加入环境变量.
2. VS Build Tools安装
不安装会报错
error: Microsoft Visual C++ 14.0 is required. Get it with “Microsoft Visual C++ Build Tools”:
直接下载visualcppbuildtools_full.exe默认安装就行.
也可以去官网安装.
记得勾选visul studio 2015版本就行. (vc14.0 对应 vs2015)
 |
|---|
| fig |
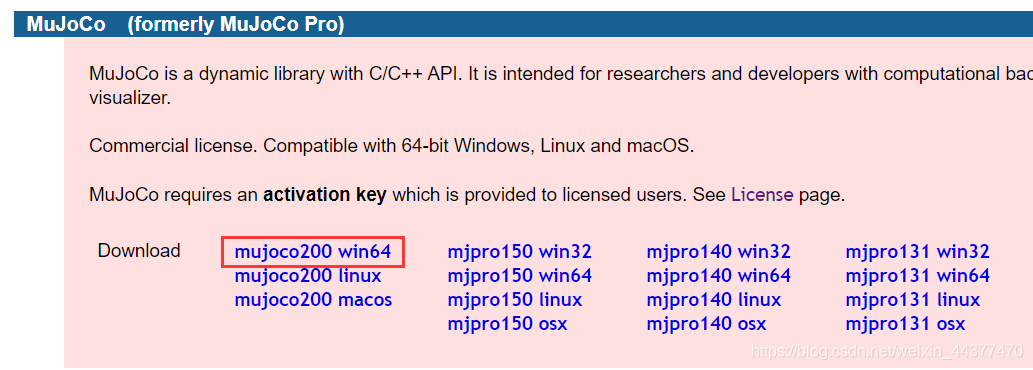
3. mujoco200安装
- MuJoCo官网填写信息。
- 运行下载的工具
getid_win64,将得到的computer id填入表单信息,填好后submit,然后邮箱会收到邮件,附件包含LICENSE.txt 和mjkey.txt文件。 - 下载邮箱收到的
LICENSE.txt和mjkey.txt文件 官网下载mujoco200对应平台的安装包 https://www.roboti.us/index.html。
|
 |
| :------------------------------: |
| fig 2 |
|
| :------------------------------: |
| fig 2 |- 在系统主目录下新建
.mujoco文件夹。通常来讲系统主目录就是C:\Users\你的名字; - 将下载的
mujoco200_win64.zip解压到.mujoco文件夹下,修改文件夹名字为mujoco200。 - 将下载的
mjkey.txt和LICENSE.txt文件拷贝到C:\Users\你的名字\.mujoco\mujoco200\bin和C:\Users\你的名字\.mujoco文件夹下。 - 新建两个环境变量:
变量名:
MUJOCO_PY_MJPRO_PATH变量值:C:\Users\你的名字\.mujoco\mujoco200变量名:MUJOCO_PY_MJKEY_PATH变量值:C:\Users\你的名字\.mujoco\mujoco200\bin\mjkey.txt这里mjkey的变量值一定要精确到文件名,不然安装Mujoco_py的时候会提示找不到mjkey文件。
4. mujoco-py和gym安装
4.1 安装gym
- 创建虚拟环境
conda create -n gym python==3.7.6 //创建一个名为“gym”,Python版本为3.7.6的conda环境 conda activate gym - 安装gym
git clone https://github.com/openai/gym.git cd gym pip install -e . - 安装box2d
- 安装siwg. 不能使用pip安装,用anaconda3
conda install swig - 再执行命令安装box2d
pip install box2d-py
- 安装siwg. 不能使用pip安装,用anaconda3
- 安装mujoco-py
pip install -U 'mujoco-py<2.1,>=2.0'
5.测试安装
- 测试mujoco-py
import mujoco_py
import os
mj_path, _ = mujoco_py.utils.discover_mujoco()
xml_path = os.path.join(mj_path, 'model', 'humanoid.xml')
model = mujoco_py.load_model_from_path(xml_path)
sim = mujoco_py.MjSim(model)
print(sim.data.qpos)
#[0. 0. 1.4 1. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
# 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
sim.step()
print(sim.data.qpos)
#[-1.12164337e-05 7.29847036e-22 1.39975300e+00 9.99999999e-01
# 1.80085466e-21 4.45933954e-05 -2.70143345e-20 1.30126513e-19
# -4.63561234e-05 -1.88020744e-20 -2.24492958e-06 4.79357124e-05
# -6.38208396e-04 -1.61130312e-03 -1.37554006e-03 5.54173825e-05
# -2.24492958e-06 4.79357124e-05 -6.38208396e-04 -1.61130312e-03
# -1.37554006e-03 -5.54173825e-05 -5.73572648e-05 7.63833991e-05
# -2.12765194e-05 5.73572648e-05 -7.63833991e-05 -2.12765194e-05]
- 测试gym
import gym
env = gym.make("CartPole-v1") # 创建游戏环境
observation = env.reset() # 游戏回到初始状态
for _ in range(1000):
env.render() # 显示当前时间戳的游戏画面
action = env.action_space.sample() # 随机生成一个动作
# 与环境交互,返回新的状态,奖励,是否结束标志,其他信息
observation, reward, done, info = env.step(action)
if done:#游戏回合结束,复位状态
observation = env.reset()
env.close()
import gym
env = gym.make('Hero-ram-v0')
for i_episode in range(20):
observation = env.reset()
for t in range(100):
env.render()
print(observation)
action = env.action_space.sample()
observation, reward, done, info = env.step(action)
if done:
print("Episode finished after {} timesteps".format(t+1))
break
env.close()
 |
|---|
| fig |