- 连续动作空间为什么需要策略梯度方法??
在连续动作空间, 贪婪策略提升因为需要在每一步都需要全局最大值, 所以很困难. 此时经常使用策略梯度方式进行改进, 沿Q值梯度的方向进行提升.
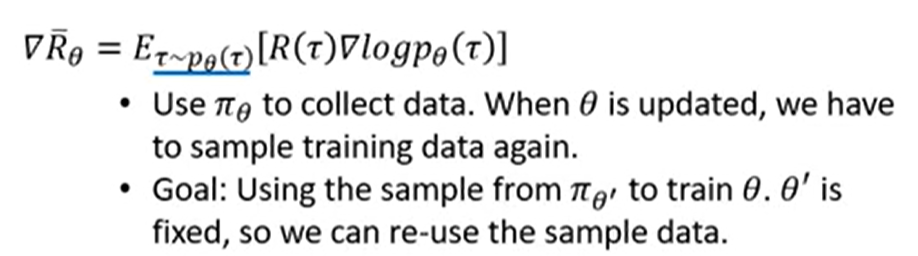
- VPG,TRPO,PPO等算法使用on-policy, 也就是不适用老样本, 使得样本效率低, 但是这些算法的数学原理比较好, 直接优化策略性能目标函数. 所以更关注稳定性, 而不是样本效率. 他们一系列的改进都是为了提高样本效率.
- DDPG->TD3->SAC, 使用off-policy, 这些算法样本效率高, 但是不稳定.
- 强化学习是什么?
RL研究通过试错法对智能体进行训练, 通过奖励信号引导智能体, 使其可以重复执行有用的动作, 放弃无用的动作.
- 为什么Q-learning不稳定?
这篇论文还有suttonRLbook11.3节讨论了, function approximation, bootstrapping, off-policy data, 这三者结合造成了值函数学习算法的不稳定性.
- PPO为什么使用重要性采样? 为什么DQN就可以使用off-policy?
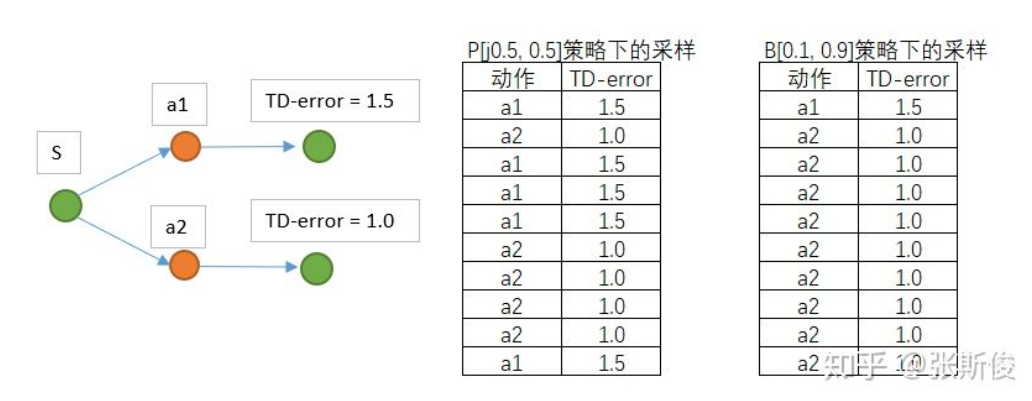
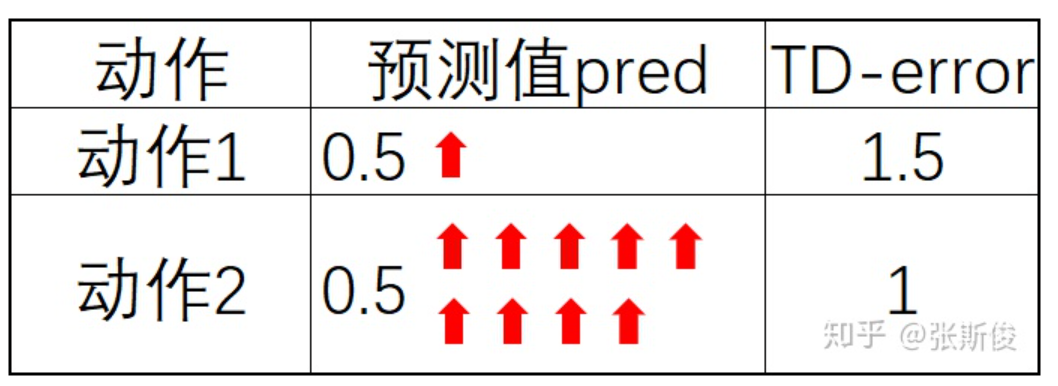
off-policy 在AC架构中不太适用, 因为AC使用off-policy时行动策略会对参数更新产生很大的影响, 如果行动策略对动作有偏向, TD更新时, 目标网络也会有偏向. 如图所示
 |
 |
 |
|---|---|---|
| fig 3 | fig 3 | fig 3 |
而重要性采样可以一定程度上缓解这个问题, 用对TD-error进行加权, 可以缓解TD误差对权重的影响, 如图3. 而DQN可以, 因为更新Q值和策略无关, 从同一个动作出发到达不同状态, 其概率由环境模型决定, 与行动策略无关; 另外DQN的更新是有目标的, 不会让行动策略带跑, 但是PG算法更新时会不断远离原来的策略分布, 所以要把握好远离的次数和比例都得控制好.
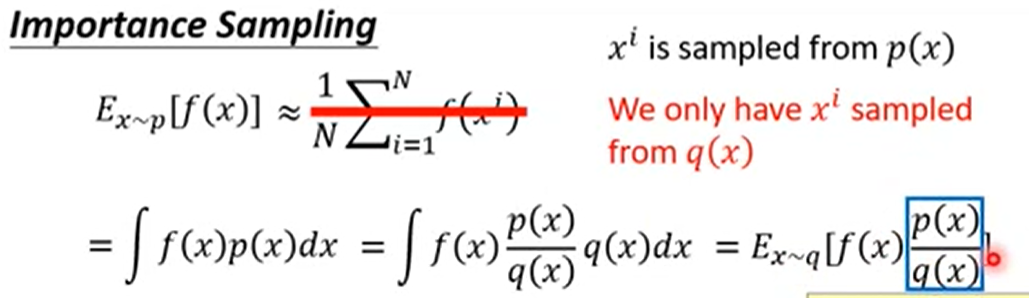
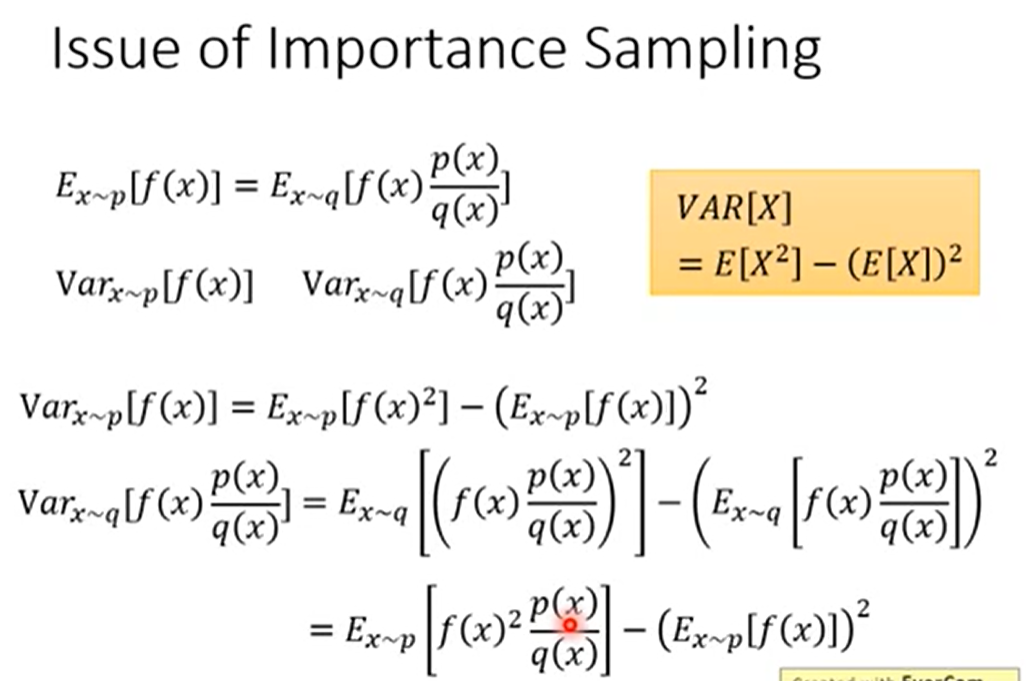
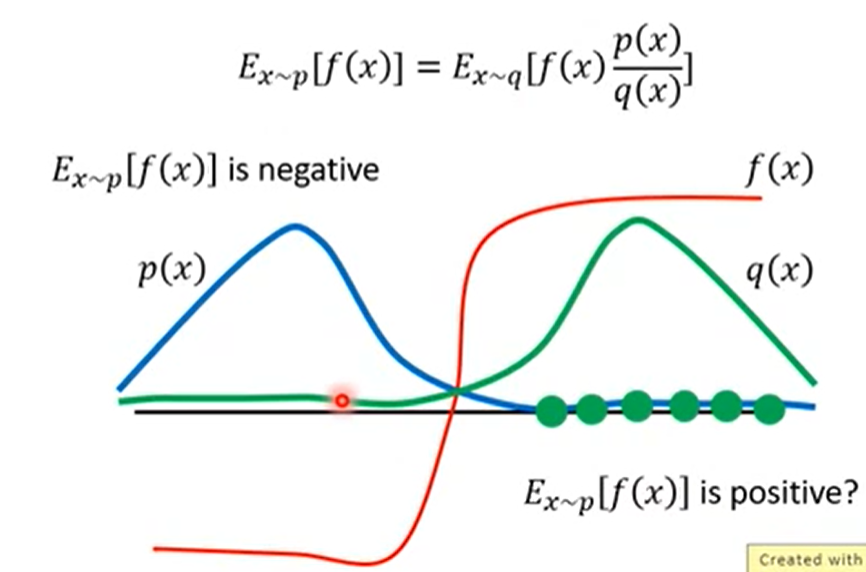
- 使用重要性采样求得的期望和原来的概率分布一样, 但是因为是抽样的, 所以方差会差很多.
 |
 |
 |
 |
|---|---|---|---|
| fig 3 | fig 3 | fig 3 | fig 3 |
所以P和Q不能相差太多.
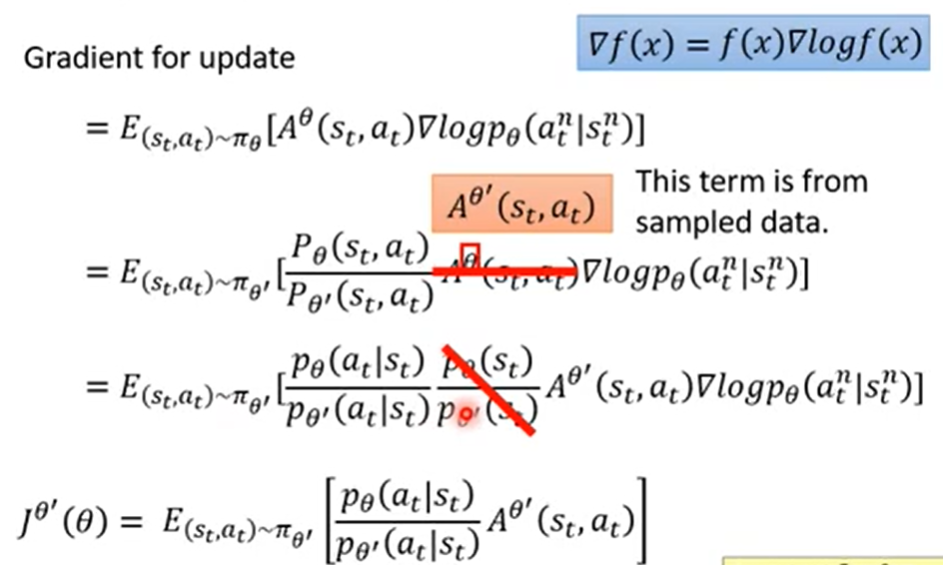
- off-policy的PG算法的目标函数推导过程
 |
|---|
| fig |
策略迭代与值迭代的区别.
下一步整理, RL基本概念spinningup
- 下一步即将整理: PG-PPO https://zhuanlan.zhihu.com/p/43114711